Department of Mechanical Engineering, Harbin Institute of Technology, Weihai, 264209, China.
School of Information Science and Engineering, Harbin Institute of Technology, Weihai, 264209, China.
Adv Sci (Weinh). 2022 Oct;9(29):e2203305. doi: 10.1002/advs.202203305. Epub 2022 Aug 19.
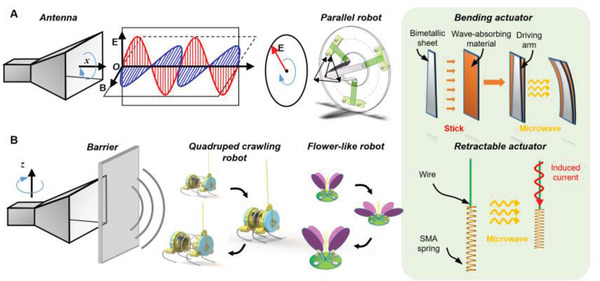
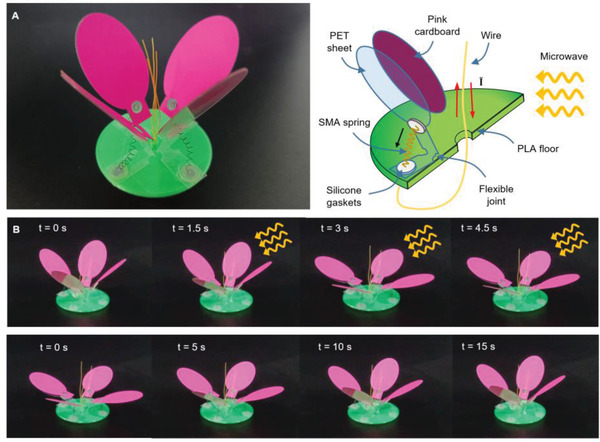
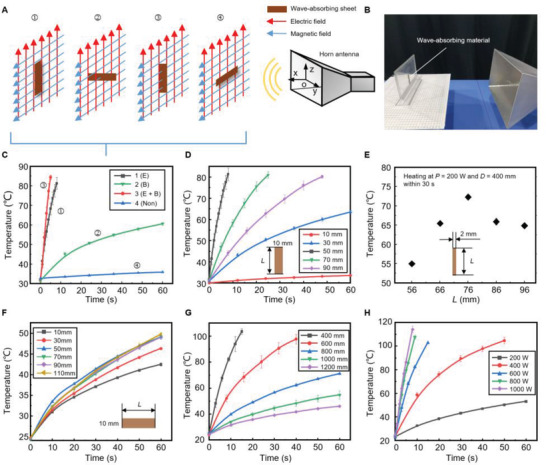
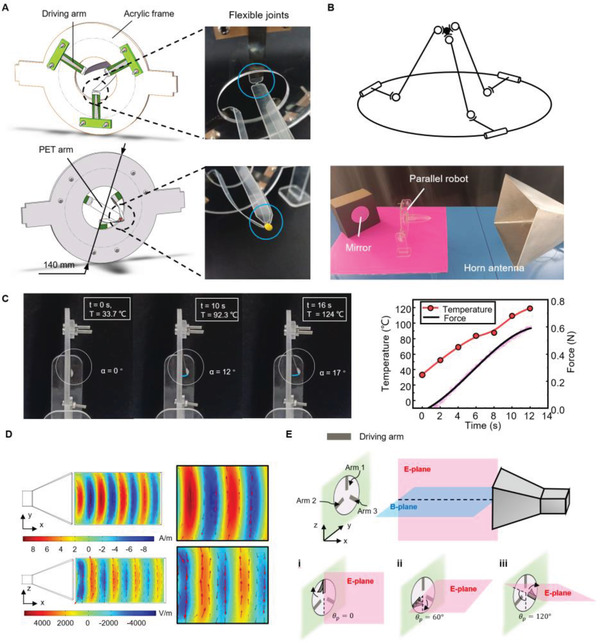
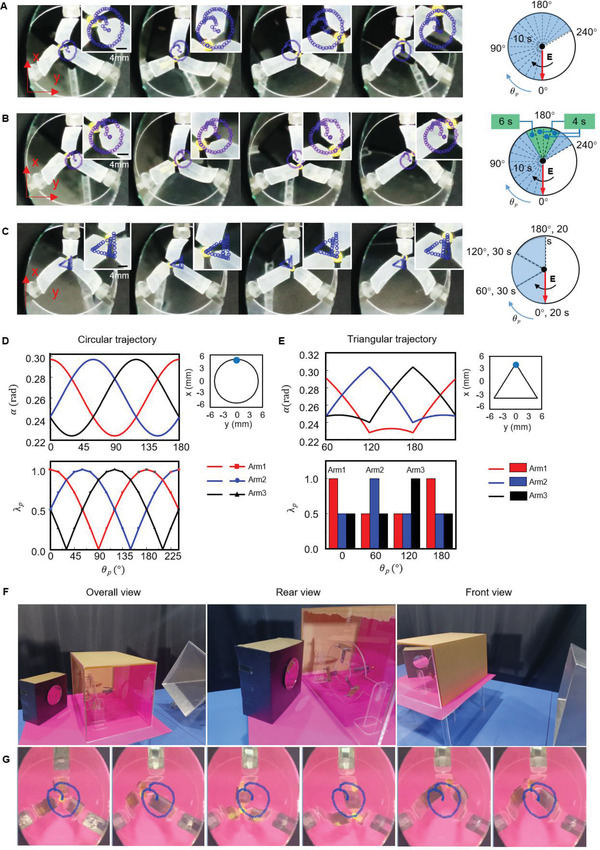
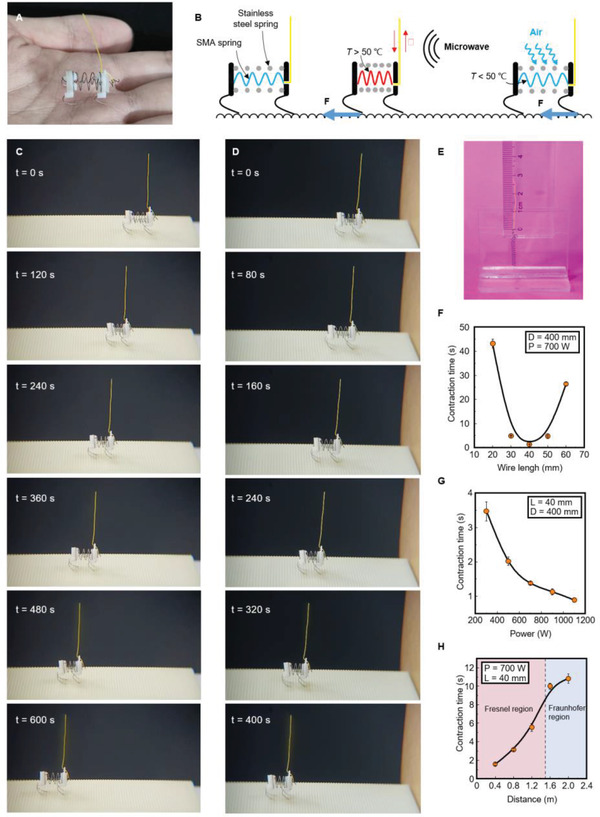
Microwaves have become a promising wireless driving strategy due to the advantages of transmissivity through obstacles, fast energy targeting, and selective heating. Although there are some studies on microwave powered artificial muscles based on different structures, the lack of studies on microwave control has limited the development of microwave-driven (MWD) robots. Here, a far-field MWD parallel robot controlled by adjusting energy distribution via changing the polarization direction of microwaves at 2.47 GHz is first reported. The parallel robot is based on three double-layer bending actuators composed of wave-absorbing sheets and bimetallic sheets, and it can implement circular and triangular path at a distance of 0.4 m under 700 W transmitting power. The thermal response rate of the actuator under microwaves is studied, and it is found that the electric-field components can provide a faster thermal response at the optimal length of actuator than magnetic-field components. The work of the parallel robot is demonstrated in an enclosed space composed of microwave-transparent materials. This developed method demonstrates the multi-degree-of-freedom controllability for robots using microwaves and offers potential solutions for some engineering cases, such as pipeline/reactors inspection and medical applications.
微波由于具有穿透障碍物、快速能量靶向和选择性加热等优点,已成为一种很有前途的无线驱动策略。虽然有一些基于不同结构的微波供电人工肌肉的研究,但缺乏对微波控制的研究限制了微波驱动(MWD)机器人的发展。在这里,首次报道了一种通过改变 2.47GHz 微波的极化方向来调节能量分布的远场 MWD 并联机器人。该并联机器人基于三个由吸波片和双金属片组成的双层弯曲致动器,在 700W 发射功率下,可以在 0.4m 的距离内实现圆形和三角形轨迹。研究了微波下致动器的热响应率,发现电场分量在致动器的最佳长度下比磁场分量提供更快的热响应。在由微波透明材料组成的封闭空间中演示了并联机器人的工作。该开发方法展示了使用微波的机器人的多自由度可控性,并为一些工程案例提供了潜在的解决方案,如管道/反应器检查和医疗应用。