Centro de Automática y Robótica, Consejo Superior de Investigaciones Científicas - Universidad Politécnica de Madrid, Madrid, Spain.
Electronic Technology Department, Universidad Rey Juan Carlos, Madrid, Spain.
J Neuroeng Rehabil. 2022 Oct 8;19(1):109. doi: 10.1186/s12984-022-01088-2.
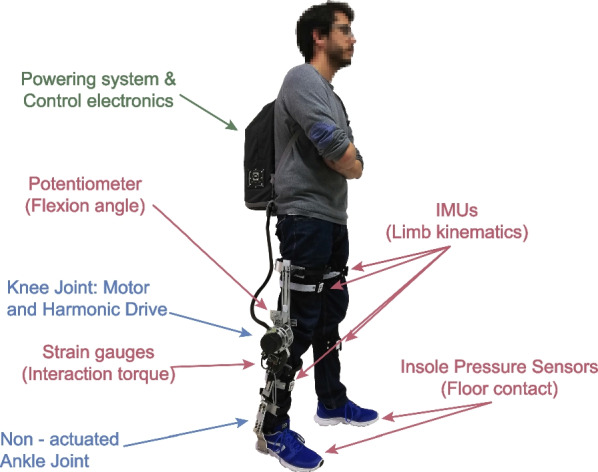
Hemiparetic gait is characterized by strong asymmetries that can severely affect the quality of life of stroke survivors. This type of asymmetry is due to motor deficits in the paretic leg and the resulting compensations in the nonparetic limb. In this study, we aimed to evaluate the effect of actively promoting gait symmetry in hemiparetic patients by assessing the behavior of both paretic and nonparetic lower limbs. This paper introduces the design and validation of the REFLEX prototype, a unilateral active knee-ankle-foot orthosis designed and developed to naturally assist the paretic limbs of hemiparetic patients during gait.
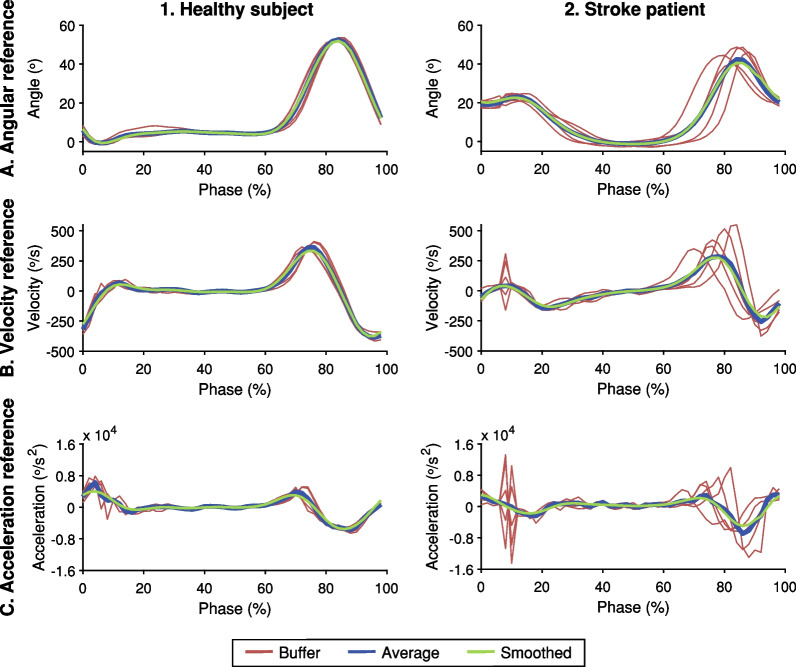
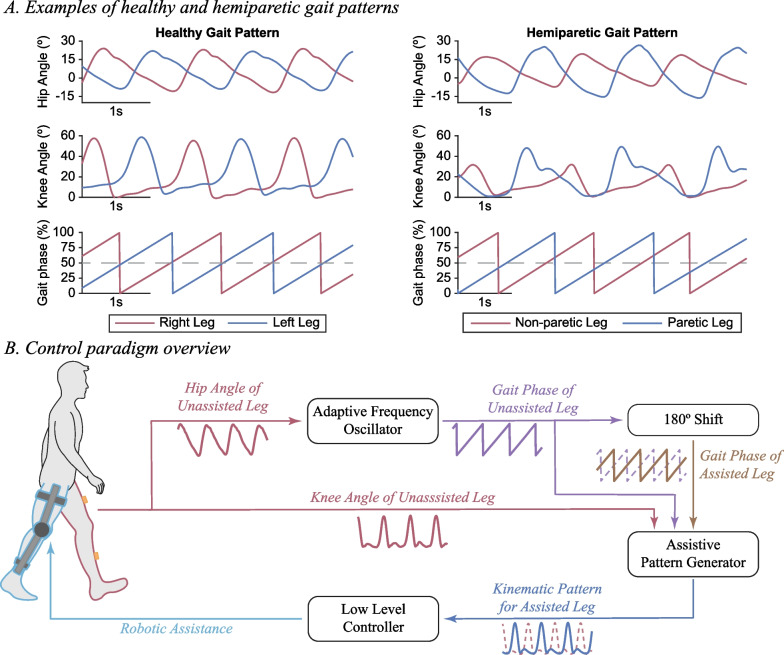
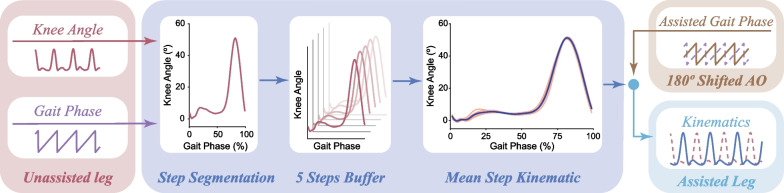
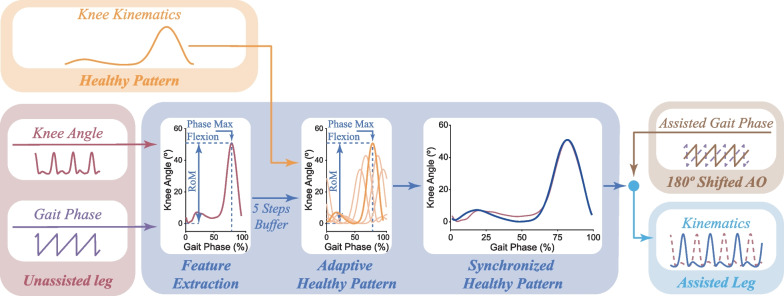
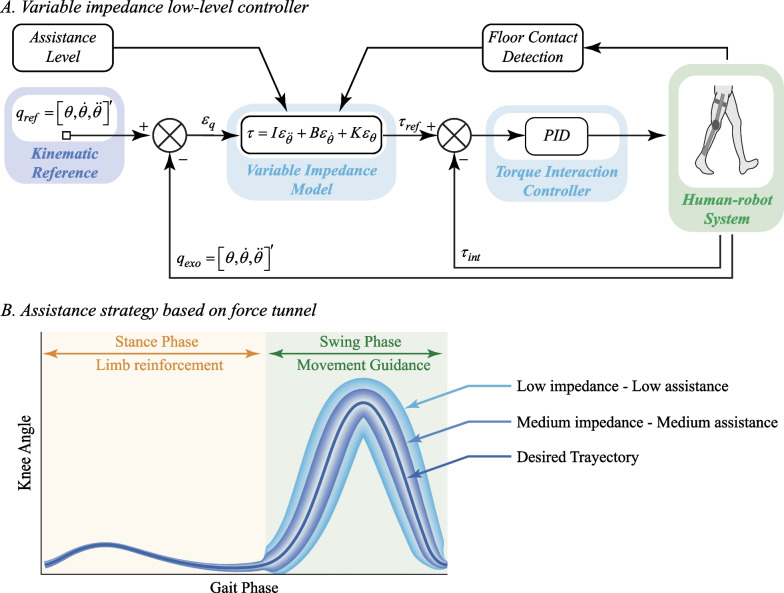
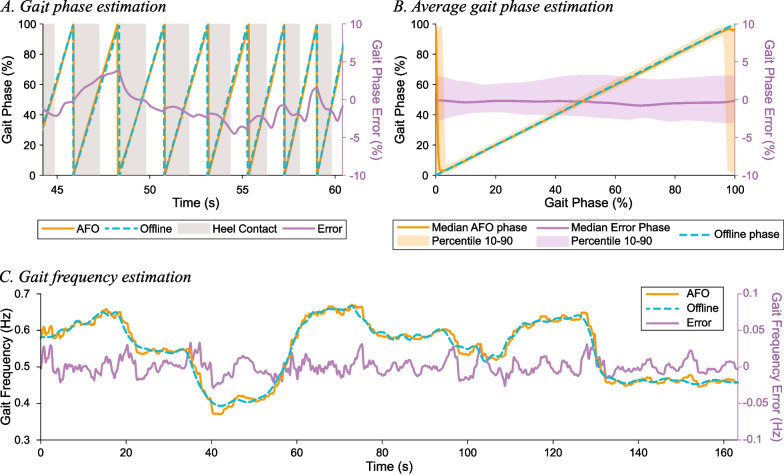
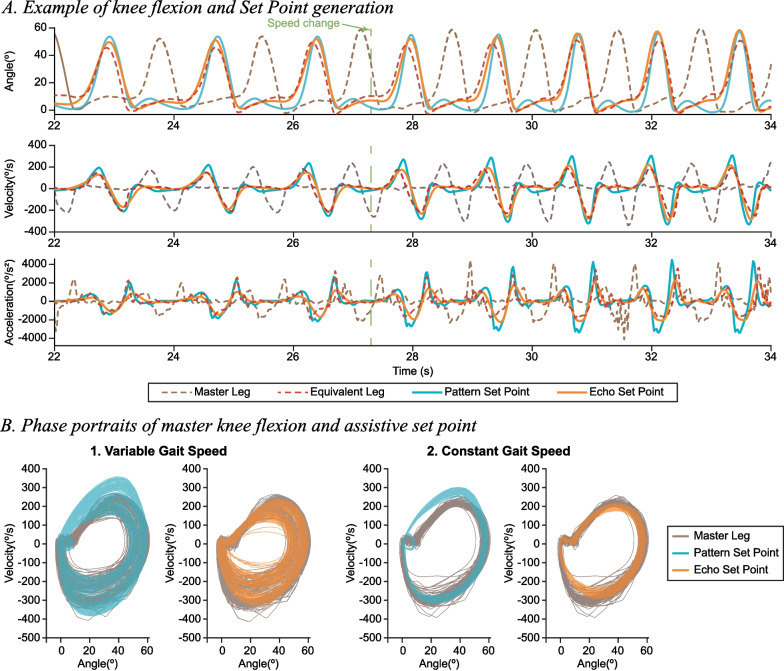
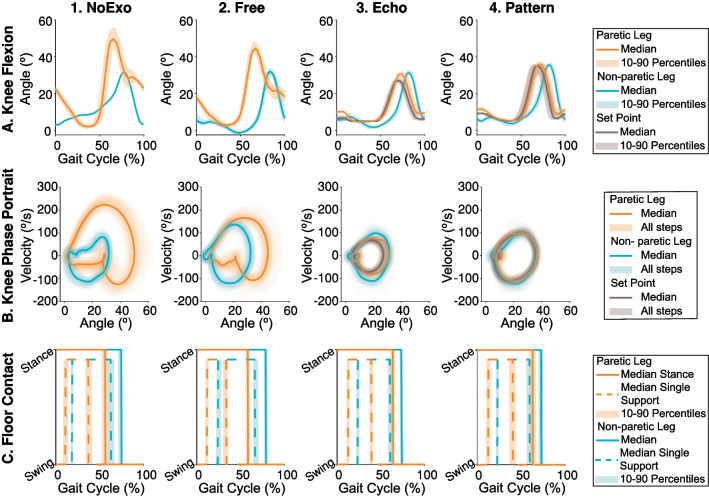
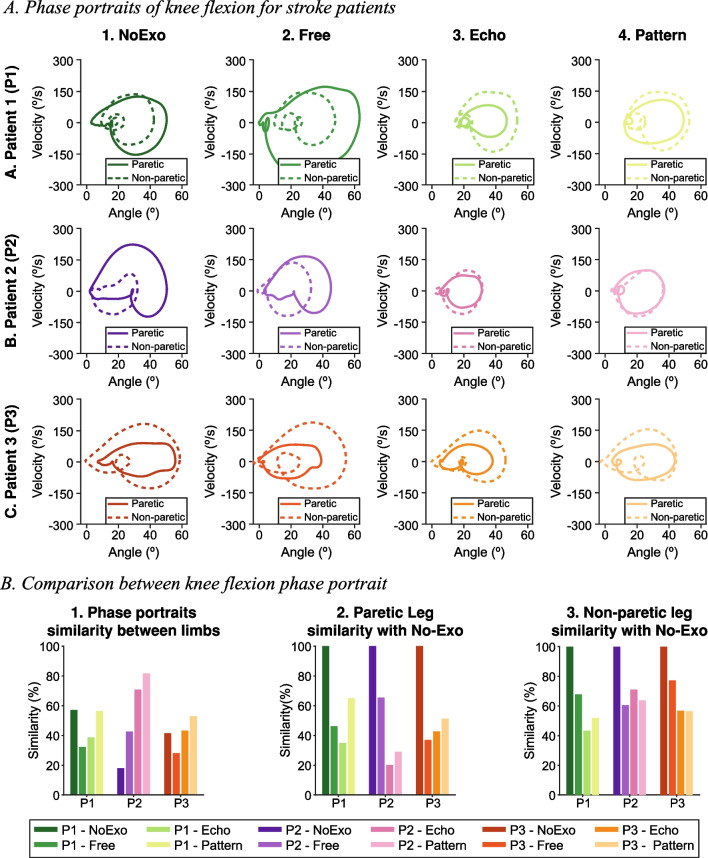
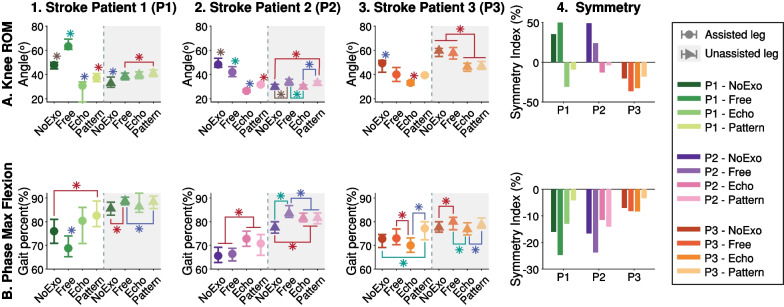
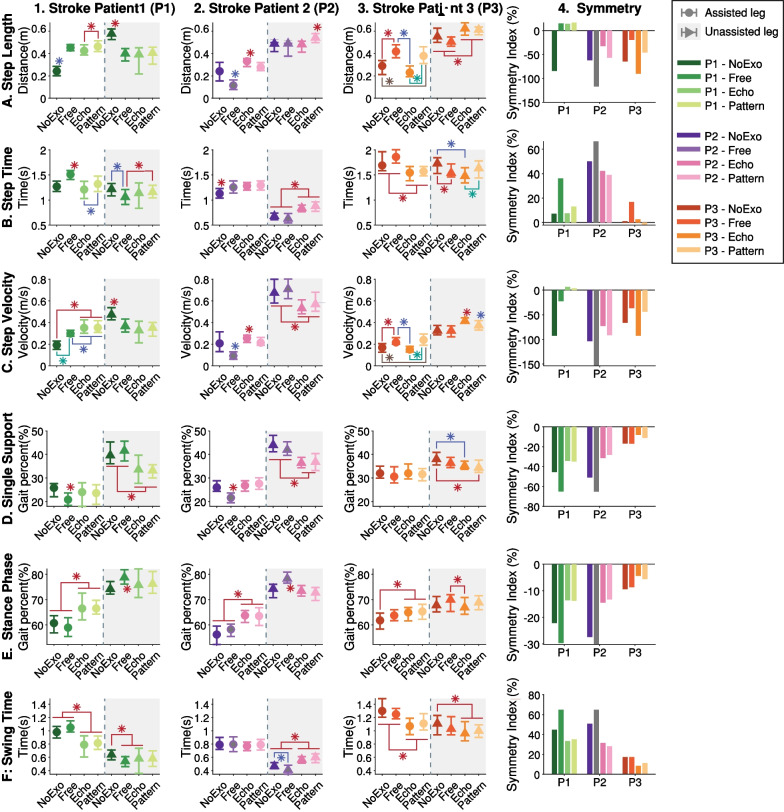
REFLEX uses an adaptive frequency oscillator to estimate the continuous gait phase of the nonparetic limb. Based on this estimation, the device synchronically assists the paretic leg following two different control strategies: (1) replicating the movement of the nonparetic leg or (2) inducing a healthy gait pattern for the paretic leg. Technical validation of the system was implemented on three healthy subjects, while the effect of the generated assistance was assessed in three stroke patients. The effects of this assistance were evaluated in terms of interlimb symmetry with respect to spatiotemporal gait parameters such as step length or time, as well as the similarity between the joint's motion in both legs.
Preliminary results proved the feasibility of the REFLEX prototype to assist gait by reinforcing symmetry. They also pointed out that the assistance of the paretic leg resulted in a decrease in the compensatory strategies developed by the nonparetic limb to achieve a functional gait. Notably, better results were attained when the assistance was provided according to a standard healthy pattern, which initially might suppose a lower symmetry but enabled a healthier evolution of the motion of the nonparetic limb.
This work presents the preliminary validation of the REFLEX prototype, a unilateral knee exoskeleton for gait assistance in hemiparetic patients. The experimental results indicate that assisting the paretic leg of a hemiparetic patient based on the movement of their nonparetic leg is a valuable strategy for reducing the compensatory mechanisms developed by the nonparetic limb.
偏瘫步态的特点是严重的不对称,这会严重影响脑卒中幸存者的生活质量。这种不对称性是由于患侧肢体的运动缺陷和非患侧肢体的代偿所致。在这项研究中,我们旨在通过评估患侧和非患侧下肢的行为来评估主动促进偏瘫患者步态对称性的效果。本文介绍了 REFLEX 原型的设计和验证,REFLEX 是一种单侧主动膝踝足矫形器,旨在通过自然辅助偏瘫患者的患侧肢体来帮助他们实现更自然的步态。
REFLEX 使用自适应频率振荡器来估计非患侧下肢的连续步态阶段。基于此估计,该设备根据两种不同的控制策略同步辅助患侧腿部运动:(1)复制非患侧腿部的运动;(2)为患侧腿部诱导健康的步态模式。该系统的技术验证是在三个健康受试者上进行的,而在三个脑卒中患者上评估了生成的辅助效果。通过比较步长、时间等时空步态参数和双腿关节运动的相似性,评估了这种辅助对肢体间对称性的影响。
初步结果证明了 REFLEX 原型通过增强对称性来辅助步态的可行性。结果还表明,辅助患侧腿部会导致非患侧腿部减少代偿策略,以实现功能性步态。值得注意的是,当根据标准健康模式提供辅助时,效果更好,尽管最初可能对称性较低,但可以使非患侧腿部的运动更健康地发展。
这项工作初步验证了 REFLEX 原型,这是一种用于辅助偏瘫患者步态的单侧膝部外骨骼。实验结果表明,基于非患侧腿部的运动来辅助偏瘫患者的患侧腿部是一种有价值的策略,可以减少非患侧腿部的代偿机制。