Biorobotics laboratory (BioRob), EPFL, Lausanne, Switzerland.
Translational Neural Engineering Lab (TNE), EPFL, Geneva, Switzerland.
J Neuroeng Rehabil. 2021 Jul 27;18(1):119. doi: 10.1186/s12984-021-00906-3.
Many lower-limb exoskeletons have been developed to assist gait, exhibiting a large range of control methods. The goal of this paper is to review and classify these control strategies, that determine how these devices interact with the user.
In addition to covering the recent publications on the control of lower-limb exoskeletons for gait assistance, an effort has been made to review the controllers independently of the hardware and implementation aspects. The common 3-level structure (high, middle, and low levels) is first used to separate the continuous behavior (mid-level) from the implementation of position/torque control (low-level) and the detection of the terrain or user's intention (high-level). Within these levels, different approaches (functional units) have been identified and combined to describe each considered controller.
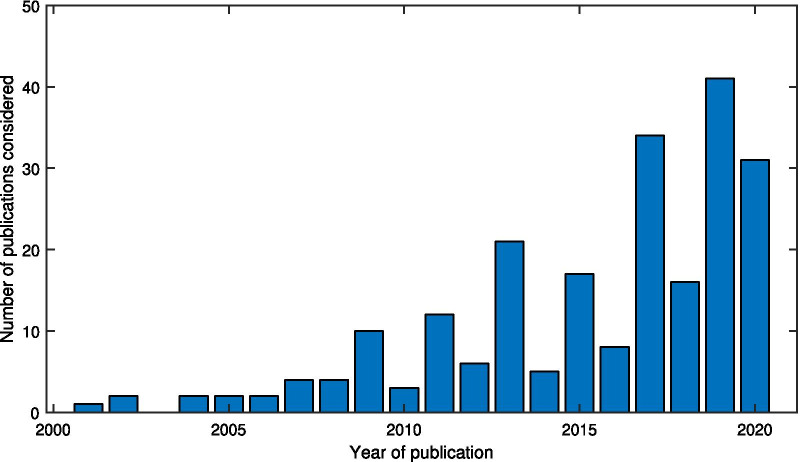
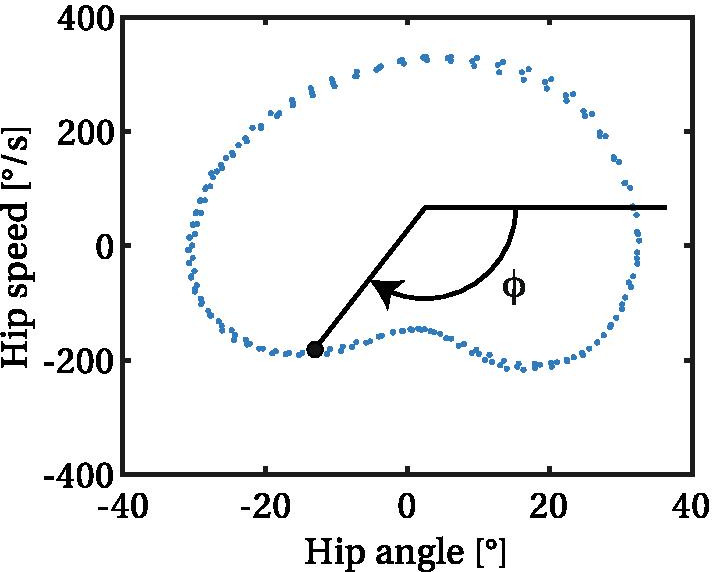
291 references have been considered and sorted by the proposed classification. The methods identified in the high-level are manual user input, brain interfaces, or automatic mode detection based on the terrain or user's movements. In the mid-level, the synchronization is most often based on manual triggers by the user, discrete events (followed by state machines or time-based progression), or continuous estimations using state variables. The desired action is determined based on position/torque profiles, model-based calculations, or other custom functions of the sensory signals. In the low-level, position or torque controllers are used to carry out the desired actions. In addition to a more detailed description of these methods, the variants of implementation within each one are also compared and discussed in the paper.
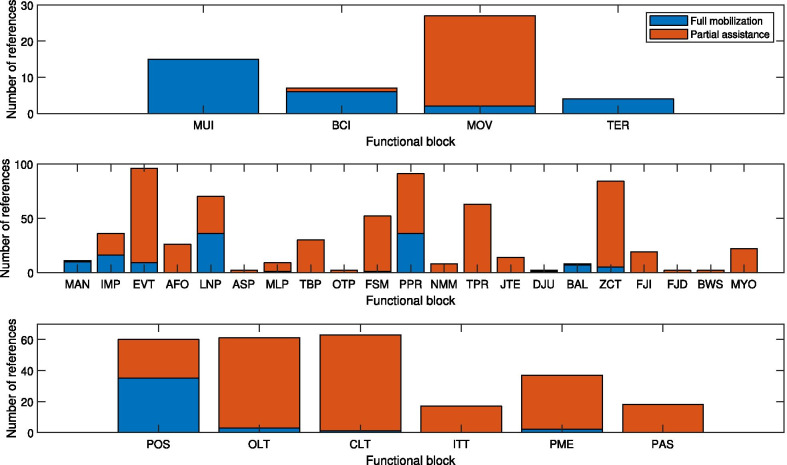
By listing and comparing the features of the reviewed controllers, this work can help in understanding the numerous techniques found in the literature. The main identified trends are the use of pre-defined trajectories for full-mobilization and event-triggered (or adaptive-frequency-oscillator-synchronized) torque profiles for partial assistance. More recently, advanced methods to adapt the position/torque profiles online and automatically detect terrains or locomotion modes have become more common, but these are largely still limited to laboratory settings. An analysis of the possible underlying reasons of the identified trends is also carried out and opportunities for further studies are discussed.
为了辅助步态,已经开发出许多下肢外骨骼,它们展示了多种控制方法。本文的目的是回顾和分类这些控制策略,以确定这些设备如何与用户交互。
除了涵盖最近关于下肢外骨骼步态辅助控制的出版物外,还努力独立于硬件和实施方面来审查控制器。首先使用常见的 3 级结构(高、中和低级)将连续行为(中级)与位置/扭矩控制的实施(低级)和地形或用户意图的检测(高级)分开。在这些级别内,已经确定并组合了不同的方法(功能单元)来描述每个考虑的控制器。
考虑了 291 篇参考文献,并按照提出的分类进行了排序。在高级别中确定的方法是手动用户输入、脑接口或基于地形或用户运动的自动模式检测。在中级,同步最常基于用户的手动触发器、离散事件(后跟状态机或基于时间的进展)或使用状态变量的连续估计。基于位置/扭矩曲线、基于模型的计算或传感器信号的其他自定义函数来确定所需的动作。在低级,使用位置或扭矩控制器来执行所需的动作。除了更详细地描述这些方法之外,本文还比较和讨论了每种方法中的实施变体。
通过列出和比较所审查的控制器的特征,可以帮助理解文献中发现的众多技术。主要确定的趋势是使用预定义轨迹进行全动员,以及使用事件触发(或自适应频率振荡器同步)扭矩曲线进行部分辅助。最近,更先进的方法来在线适应位置/扭矩曲线并自动检测地形或运动模式变得更加常见,但这些方法在很大程度上仍然限于实验室环境。还对确定的趋势的潜在原因进行了分析,并讨论了进一步研究的机会。