Javeed Madiha, Shorfuzzaman Mohammad, Alsufyani Nawal, Chelloug Samia Allaoua, Jalal Ahmad, Park Jeongmin
Department of Computer Science, Air University, Islamabad, ICT, Pakistan.
Department of Computer Science, College of Computers and Information Technology, Taif University, Taif, Saudi Arabia.
PeerJ Comput Sci. 2022 Oct 12;8:e1105. doi: 10.7717/peerj-cs.1105. eCollection 2022.
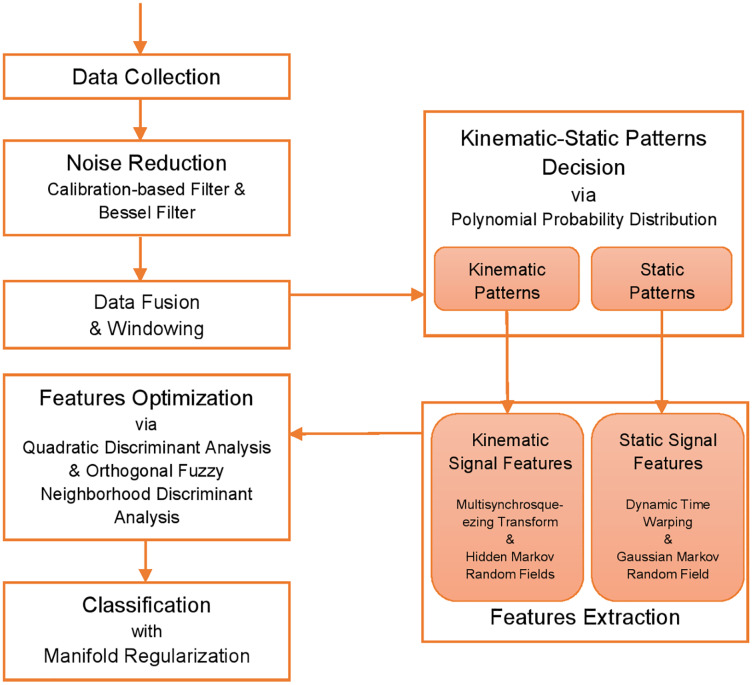
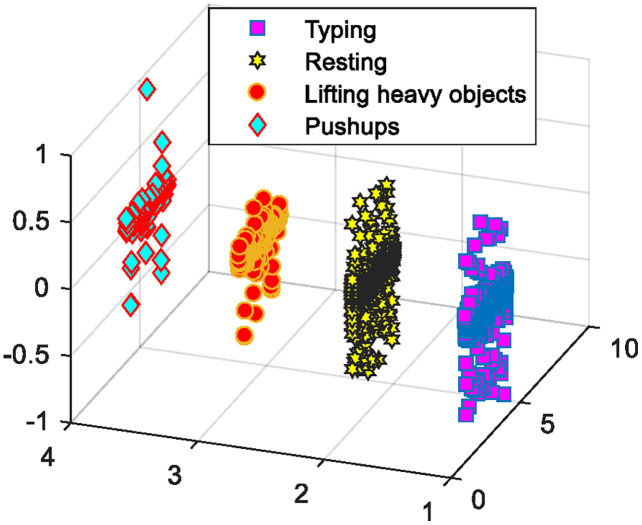
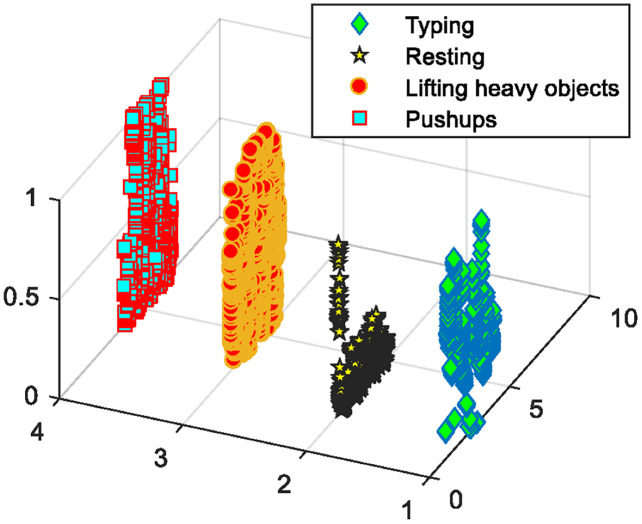
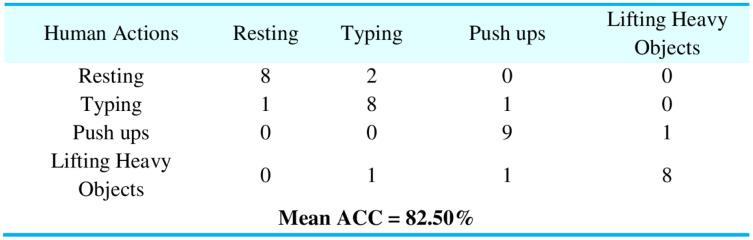
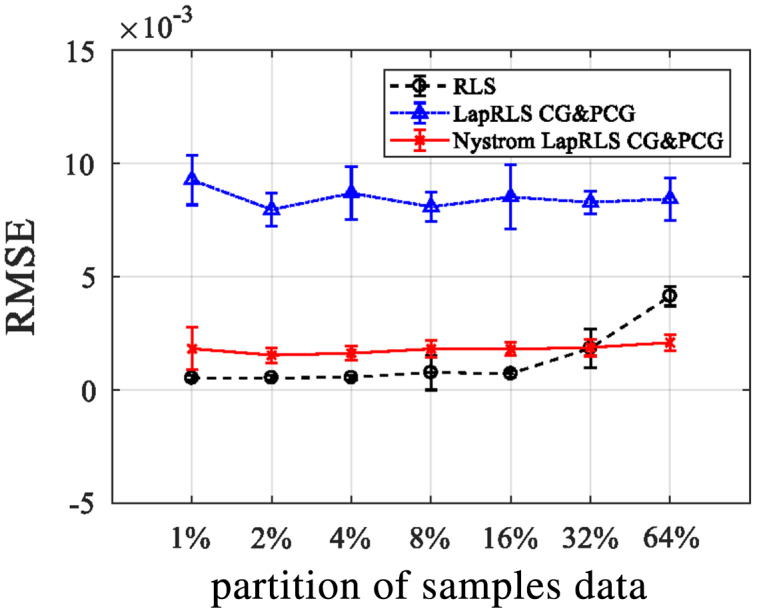
Human locomotion is an imperative topic to be conversed among researchers. Predicting the human motion using multiple techniques and algorithms has always been a motivating subject matter. For this, different methods have shown the ability of recognizing simple motion patterns. However, predicting the dynamics for complex locomotion patterns is still immature. Therefore, this article proposes unique methods including the calibration-based filter algorithm and kinematic-static patterns identification for predicting those complex activities from fused signals. Different types of signals are extracted from benchmarked datasets and pre-processed using a novel calibration-based filter for inertial signals along with a Bessel filter for physiological signals. Next, sliding overlapped windows are utilized to get motion patterns defined over time. Then, polynomial probability distribution is suggested to decide the motion patterns natures. For features extraction based kinematic-static patterns, time and probability domain features are extracted over physical action dataset (PAD) and growing old together validation (GOTOV) dataset. Further, the features are optimized using quadratic discriminant analysis and orthogonal fuzzy neighborhood discriminant analysis techniques. Manifold regularization algorithms have also been applied to assess the performance of proposed prediction system. For the physical action dataset, we achieved an accuracy rate of 82.50% for patterned signals. While, the GOTOV dataset, we achieved an accuracy rate of 81.90%. As a result, the proposed system outdid when compared to the other state-of-the-art models in literature.
人类运动是研究人员之间必须探讨的一个重要话题。使用多种技术和算法预测人类运动一直是一个备受关注的主题。为此,不同的方法已显示出识别简单运动模式的能力。然而,预测复杂运动模式的动力学仍然不够成熟。因此,本文提出了独特的方法,包括基于校准的滤波算法和运动学 - 静态模式识别,用于从融合信号中预测那些复杂活动。从基准数据集中提取不同类型的信号,并使用一种新颖的基于校准的惯性信号滤波器以及用于生理信号的贝塞尔滤波器进行预处理。接下来,利用滑动重叠窗口来获取随时间定义的运动模式。然后,建议使用多项式概率分布来确定运动模式的性质。对于基于特征提取的运动学 - 静态模式,在物理动作数据集(PAD)和共同老化验证(GOTOV)数据集上提取时间和概率域特征。此外,使用二次判别分析和正交模糊邻域判别分析技术对特征进行优化。还应用了流形正则化算法来评估所提出的预测系统的性能。对于物理动作数据集,我们对模式信号实现了82.50%的准确率。而对于GOTOV数据集,我们实现了81.90%的准确率。结果,与文献中其他现有技术模型相比,所提出的系统表现更优。