School of Electronic Engineering and Automation, Guilin University of Electronic Technology, Guilin 541004, China.
Sensors (Basel). 2023 Jan 14;23(2):981. doi: 10.3390/s23020981.
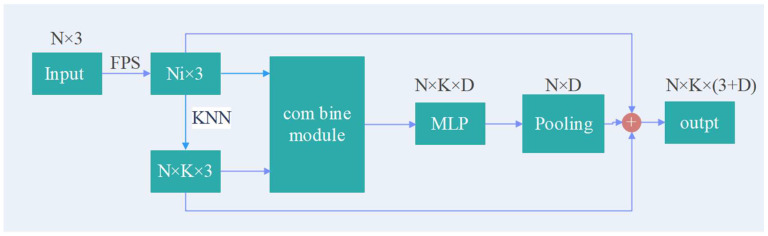
The automatic semantic segmentation of point cloud data is important for applications in the fields of machine vision, virtual reality, and smart cities. The processing capability of the point cloud segmentation method with PointNet++ as the baseline needs to be improved for extremely imbalanced point cloud scenes. To address this problem, in this study, we designed a weighted sampling method based on farthest point sampling (FPS), which adjusts the sampling weight value according to the loss value of the model to equalize the sampling process. We also introduced the relational learning of the neighborhood space of the sampling center point in the feature encoding process, where the feature importance is distinguished by using a self-attention model. Finally, the global-local features were aggregated and transmitted using the hybrid pooling method. The experimental results of the six-fold crossover experiment showed that on the S3DIS semantic segmentation dataset, the proposed network achieved 9.5% and 11.6% improvement in overall point-wise accuracy (OA) and mean of class-wise intersection over union (MIoU), respectively, compared with the baseline. On the Vaihingen dataset, the proposed network achieved 4.2% and 3.9% improvement in OA and MIoU, respectively, compared with the baseline. Compared with the segmentation results of other network models on public datasets, our algorithm achieves a good balance between OA and MIoU.
点云数据的自动语义分割对于机器视觉、虚拟现实和智慧城市等领域的应用非常重要。为了解决这个问题,在这项研究中,我们设计了一种基于最远点采样(FPS)的加权采样方法,根据模型的损失值调整采样权重值,从而实现采样过程的均衡。我们还在特征编码过程中引入了采样中心点邻域空间的关系学习,使用自注意力模型区分特征的重要性。最后,使用混合池化方法聚合和传递全局-局部特征。六重交叉实验的实验结果表明,在 S3DIS 语义分割数据集上,与基线相比,所提出的网络在整体点准确率(OA)和平均类间交并比(MIoU)方面分别提高了 9.5%和 11.6%。在 Vaihingen 数据集上,与基线相比,所提出的网络在 OA 和 MIoU 方面分别提高了 4.2%和 3.9%。与公共数据集上其他网络模型的分割结果相比,我们的算法在 OA 和 MIoU 之间取得了良好的平衡。