Scherb David, Wartzack Sandro, Miehling Jörg
Friedrich-Alexander-Universität Erlangen-Nürnberg, Engineering Design, Erlangen, Germany.
Front Bioeng Biotechnol. 2023 Jan 10;10:1044275. doi: 10.3389/fbioe.2022.1044275. eCollection 2022.
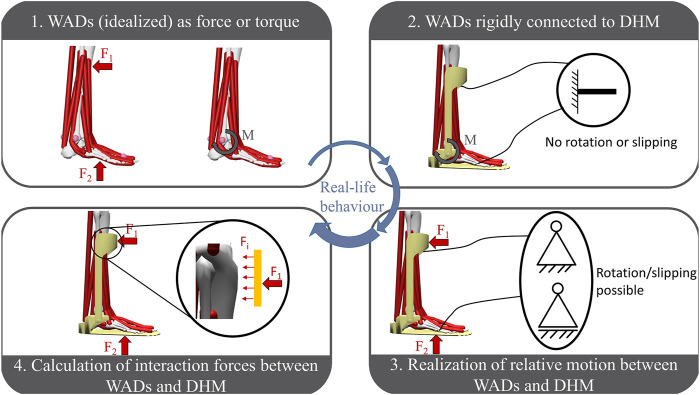
Exoskeletons, orthoses, exosuits, assisting robots and such devices referred to as wearable assistive devices are devices designed to augment or protect the human body by applying and transmitting force. Due to the problems concerning cost- and time-consuming user tests, in addition to the possibility to test different configurations of a device, the avoidance of a prototype and many more advantages, digital human models become more and more popular for evaluating the effects of wearable assistive devices on humans. The key indicator for the efficiency of assistance is the interface between device and human, consisting mainly of the soft biological tissue. However, the soft biological tissue is mostly missing in digital human models due to their rigid body dynamics. Therefore, this systematic review aims to identify interaction modelling approaches between wearable assistive devices and digital human models and especially to study how the soft biological tissue is considered in the simulation. The review revealed four interaction modelling approaches, which differ in their accuracy to recreate the occurring interactions in reality. Furthermore, within these approaches there are some incorporating the appearing relative motion between device and human body due to the soft biological tissue in the simulation. The influence of the soft biological tissue on the force transmission due to energy absorption on the other side is not considered in any publication yet. Therefore, the development of an approach to integrate the viscoelastic behaviour of soft biological tissue in the digital human models could improve the design of the wearable assistive devices and thus increase its efficiency and efficacy.
外骨骼、矫形器、外穿式防护服、辅助机器人以及此类被称为可穿戴辅助设备的装置,是通过施加和传递力来增强或保护人体的设备。由于存在用户测试成本高且耗时的问题,以及测试设备不同配置的可能性、避免制作原型等诸多优势,数字人体模型在评估可穿戴辅助设备对人体的影响方面越来越受欢迎。辅助效率的关键指标是设备与人体之间的界面,主要由柔软的生物组织构成。然而,数字人体模型大多由于其刚体动力学特性而缺少柔软的生物组织。因此,本系统综述旨在确定可穿戴辅助设备与数字人体模型之间的相互作用建模方法,特别是研究在模拟中如何考虑柔软的生物组织。该综述揭示了四种相互作用建模方法,它们在重现现实中发生的相互作用的准确性方面存在差异。此外,在这些方法中,有一些在模拟中纳入了由于柔软生物组织而在设备与人体之间出现的相对运动。另一方面,尚未有任何出版物考虑柔软生物组织因能量吸收而对力传递产生的影响。因此,开发一种将柔软生物组织的粘弹性行为整合到数字人体模型中的方法,可能会改进可穿戴辅助设备的设计,从而提高其效率和功效。