Syed Arsal, Morris Brendan Tran
Department of Electrical Engineering, University of Nevada Las Vegas, 4505 S Maryland Parkway, Box 454026, Las Vegas, NV 89154-4026 USA.
Mach Vis Appl. 2023;34(2):23. doi: 10.1007/s00138-022-01357-z. Epub 2023 Jan 23.
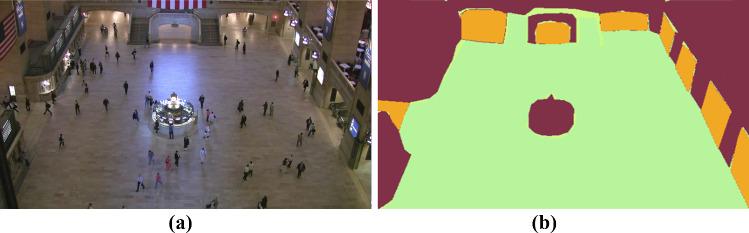
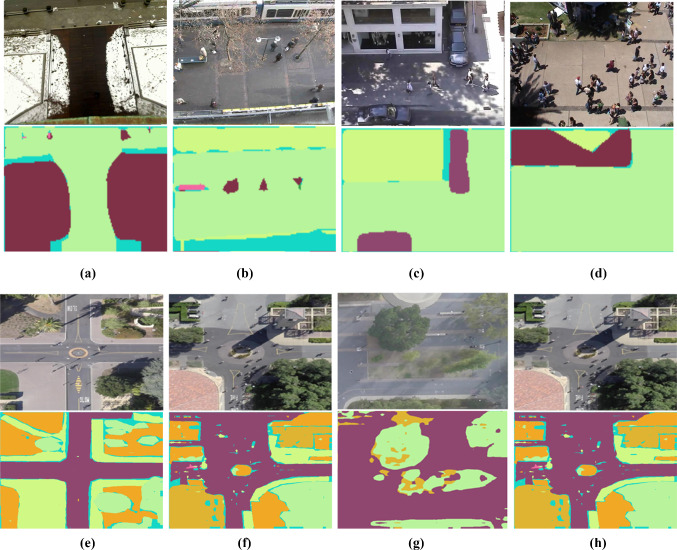
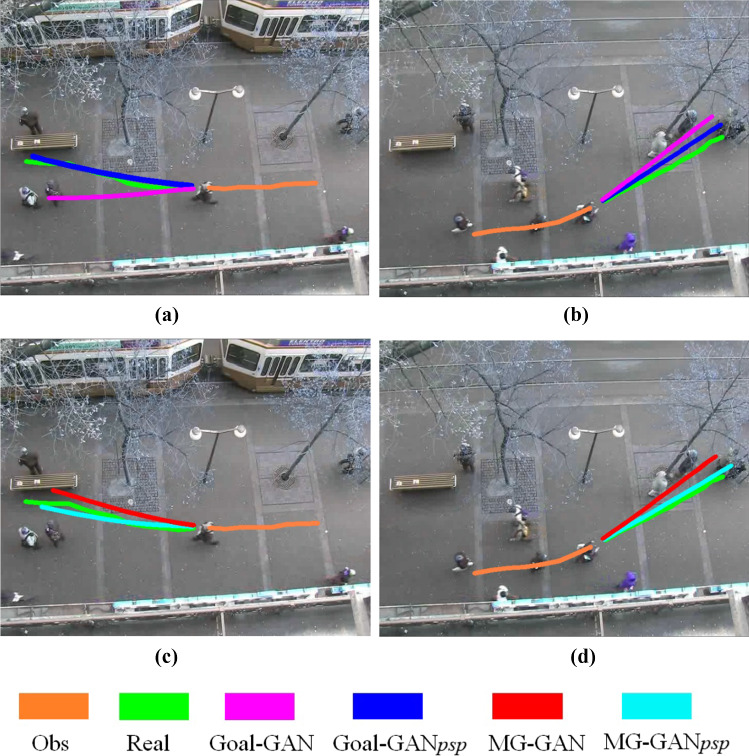
Understanding pedestrian motion is critical for many real-world applications, e.g., autonomous driving and social robot navigation. It is a challenging problem since autonomous agents require complete understanding of its surroundings including complex spatial, social and scene dependencies. In trajectory prediction research, spatial and social interactions are widely studied while scene understanding has received less attention. In this paper, we study the effectiveness of different encoding mechanisms to understand the influence of the scene on pedestrian trajectories. We leverage a recurrent Variational Autoencoder to encode pedestrian motion history, its social interaction with other pedestrians and semantic scene information. We then evaluate the performance on various public datasets, such as ETH-UCY, Stanford Drone and Grand Central Station. Experimental results show that utilizing a fully segmented map, for explicit scene semantics, out performs other variants of scene representations (semantic and CNN embedding) for trajectory prediction tasks.
理解行人运动对于许多实际应用至关重要,例如自动驾驶和社交机器人导航。这是一个具有挑战性的问题,因为自主智能体需要全面了解其周围环境,包括复杂的空间、社会和场景依赖性。在轨迹预测研究中,空间和社会交互得到了广泛研究,而场景理解受到的关注较少。在本文中,我们研究了不同编码机制对理解场景对行人轨迹影响的有效性。我们利用递归变分自编码器对行人运动历史、其与其他行人的社会交互以及语义场景信息进行编码。然后,我们在各种公共数据集上评估性能,如ETH-UCY、斯坦福无人机和中央车站数据集。实验结果表明,对于轨迹预测任务,使用完全分割的地图以获取明确的场景语义,比其他场景表示变体(语义和CNN嵌入)表现更好。