Wu Zicong, De Iturrate Reyzabal Mikel, Sadati S M Hadi, Liu Hongbin, Ourselin Sebastien, Leff Daniel, Katzschmann Robert K, Rhode Kawal, Bergeles Christos
School of Biomedical Engineering & Imaging Sciences, King's College London, London, UK.
Faculty of Medicine, Department of Surgery & Cancer, and the Hamlyn Centre for Robotic Surgery, Imperial College London, London, UK.
IEEE Robot Autom Lett. 2023 Feb;8(2):1005-1012. doi: 10.1109/LRA.2023.3234823.
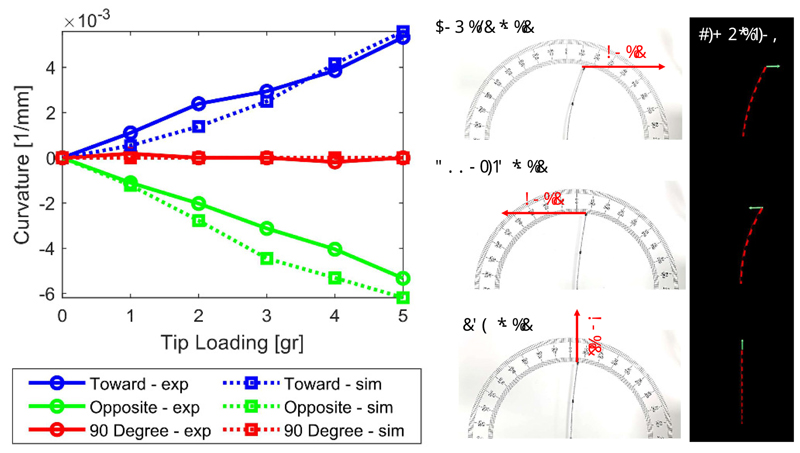
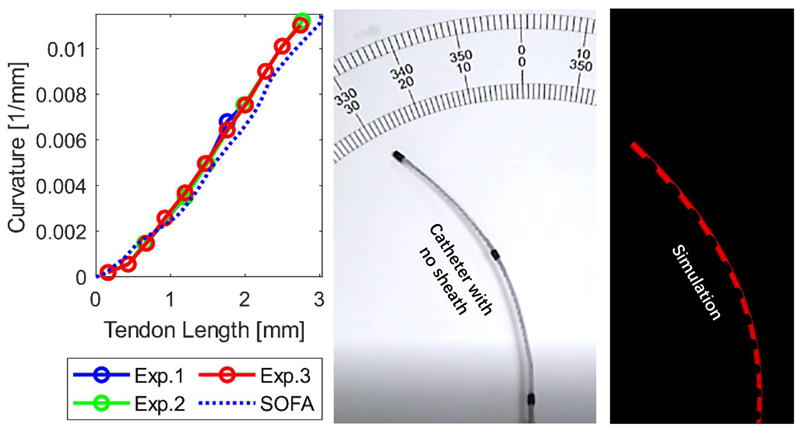
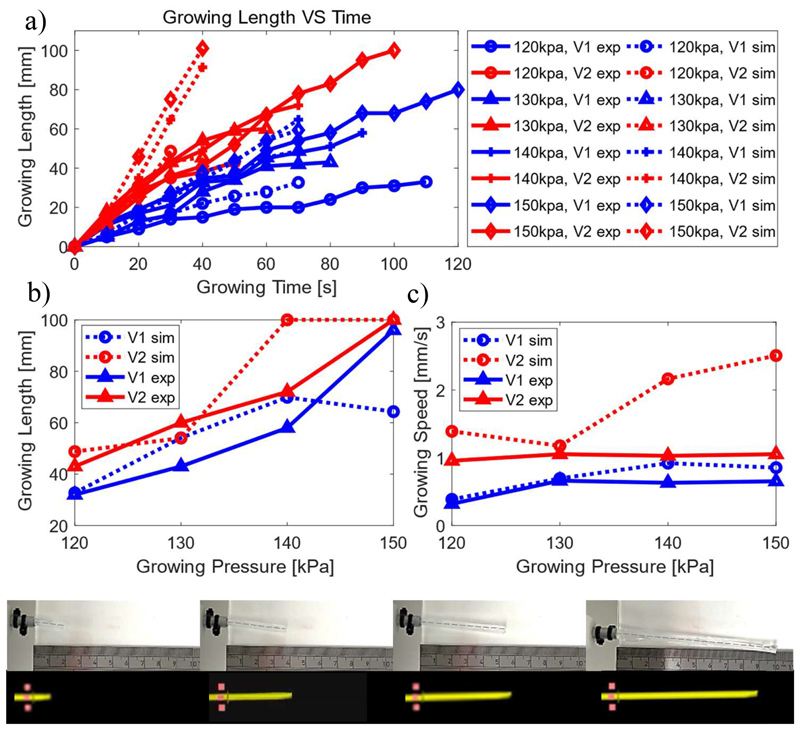
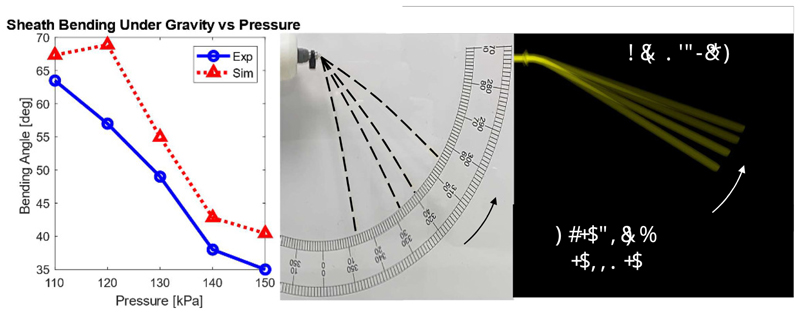
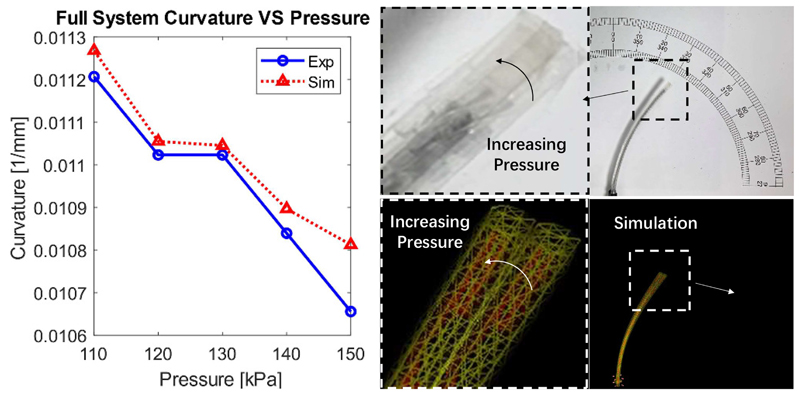
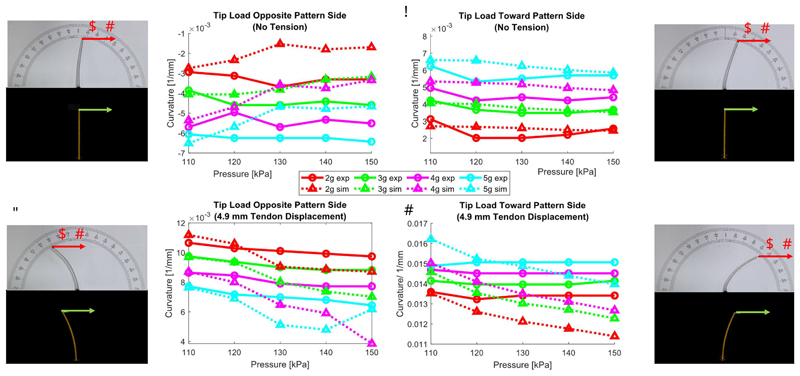
Soft robots that grow through eversion/apical extension can effectively navigate fragile environments such as ducts and vessels inside the human body. This paper presents the physics-based model of a miniature steerable eversion growing robot. We demonstrate the robot's growing, steering, stiffening and interaction capabilities. The interaction between two robot-internal components is explored, i.e., a steerable catheter for robot tip orientation, and a growing sheath for robot elongation/retraction. The behavior of the growing robot under different inner pressures and external tip forces is investigated. Simulations are carried out within the SOFA framework. Extensive experimentation with a physical robot setup demonstrates agreement with the simulations. The comparison demonstrates a mean absolute error of 10 - 20% between simulation and experimental results for curvature values, including catheter-only experiments, sheath-only experiments and full system experiments. To our knowledge, this is the first work to explore physics-based modelling of a tendon-driven steerable eversion growing robot. While our work is motivated by early breast cancer detection through mammary duct inspection and uses our MAMMOBOT robot prototype, our approach is general and relevant to similar growing robots.
通过外翻/顶端延伸生长的软体机器人能够有效地在脆弱环境中导航,如人体内部的管道和血管。本文提出了一种基于物理的微型可控外翻生长机器人模型。我们展示了该机器人的生长、转向、变硬和交互能力。探索了机器人内部两个组件之间的相互作用,即用于机器人尖端定向的可控导管和用于机器人伸长/缩回的生长鞘。研究了生长机器人在不同内部压力和外部尖端力作用下的行为。在SOFA框架内进行了模拟。使用物理机器人装置进行的大量实验表明与模拟结果一致。比较结果表明,在包括仅导管实验、仅鞘实验和全系统实验在内的曲率值模拟和实验结果之间,平均绝对误差为10%-20%。据我们所知,这是第一项探索基于物理的腱驱动可控外翻生长机器人建模的工作。虽然我们的工作是受通过乳腺导管检查进行早期乳腺癌检测所推动,并使用了我们的MAMMOBOT机器人原型,但我们的方法具有通用性,适用于类似的生长机器人。