Sakakura Noriaki, Eguchi Takashi
Department of Thoracic Surgery, Aichi Cancer Center Hospital, Nagoya 464-8681, Japan.
Division of General Thoracic Surgery, Department of Surgery, Shinshu University School of Medicine, Matsumoto 390-8621, Japan.
J Pers Med. 2023 Jan 27;13(2):230. doi: 10.3390/jpm13020230.
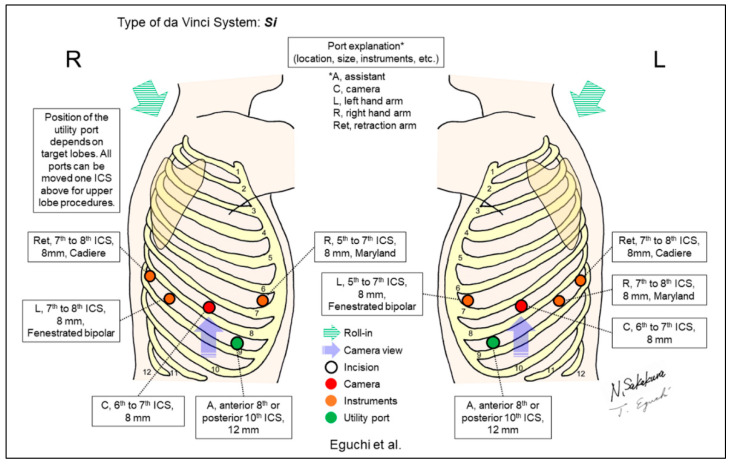
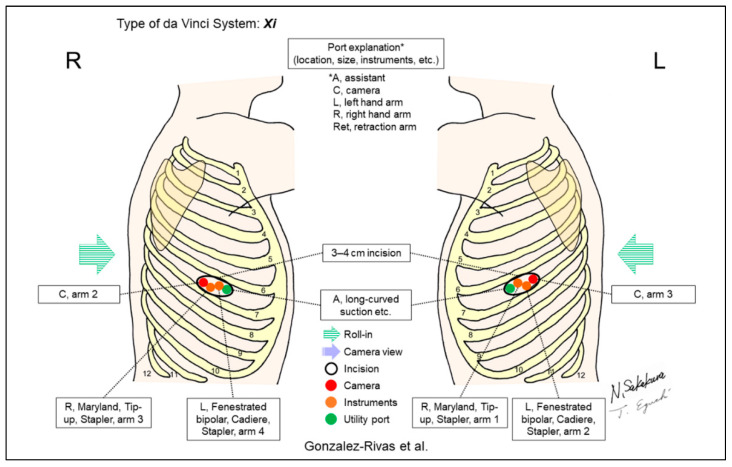
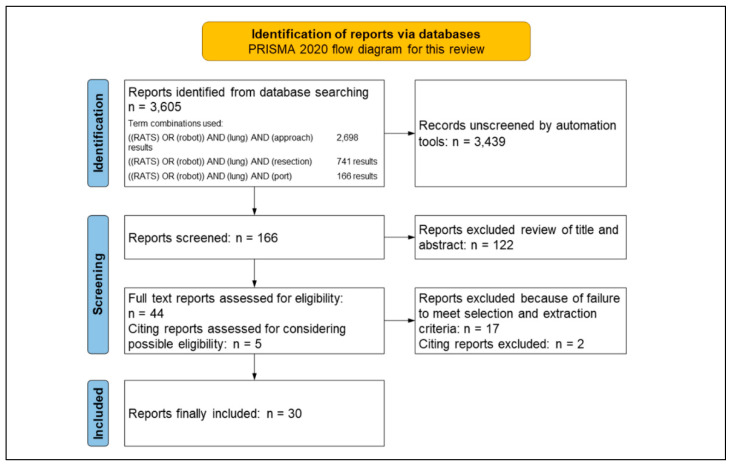
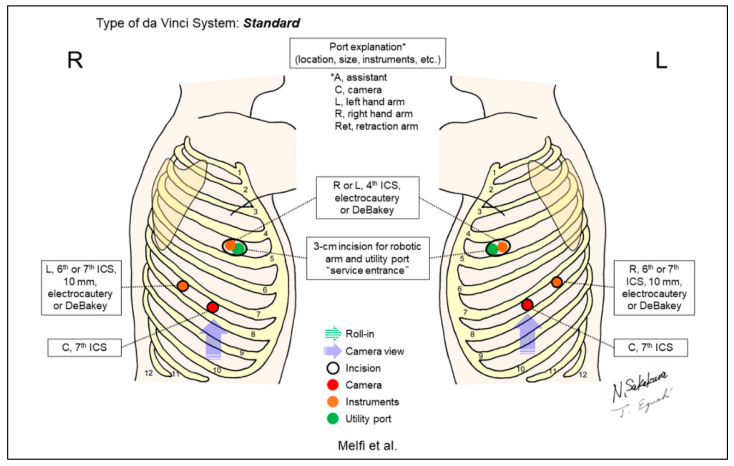
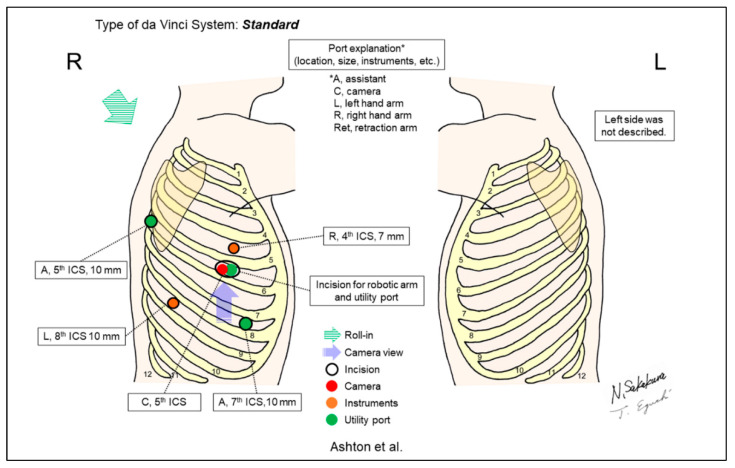
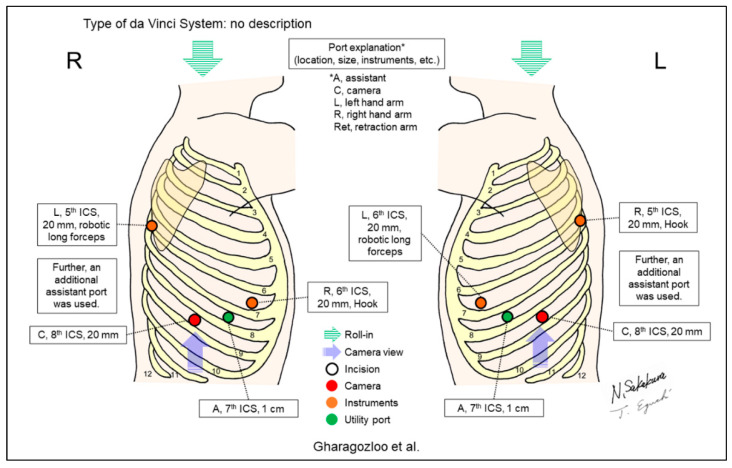
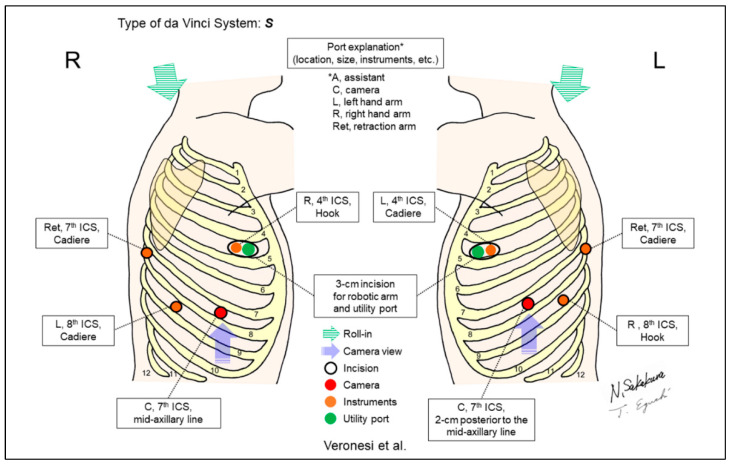
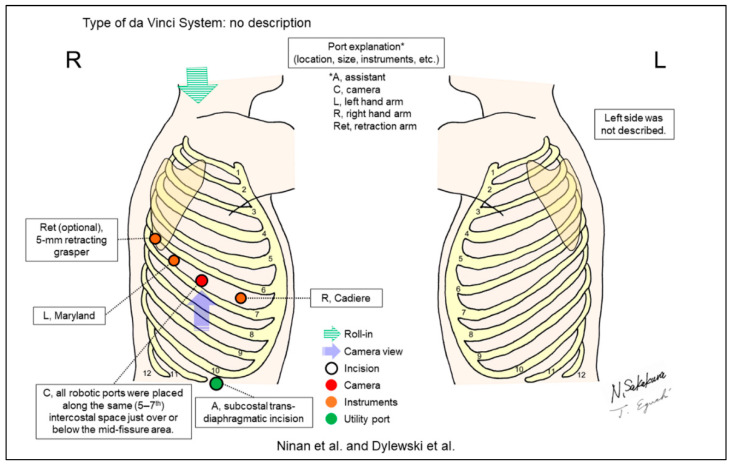
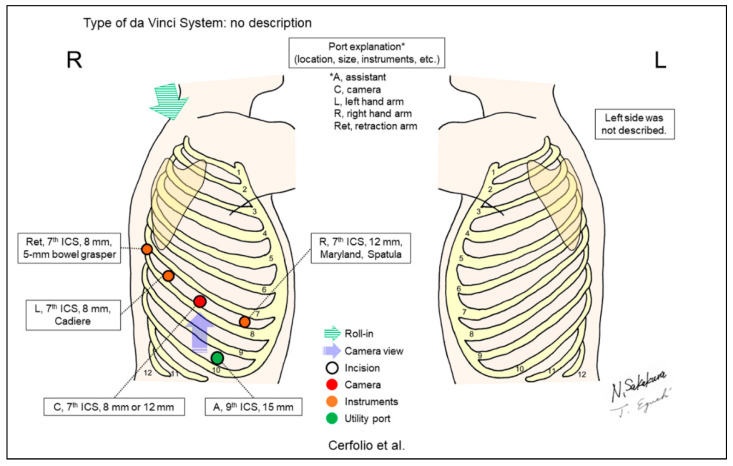
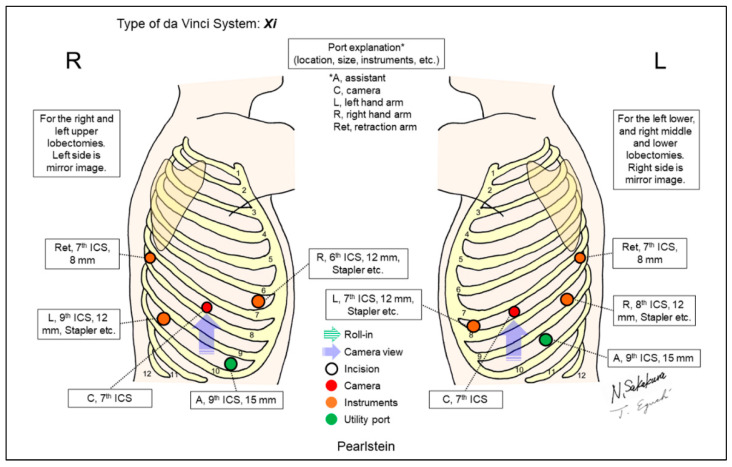
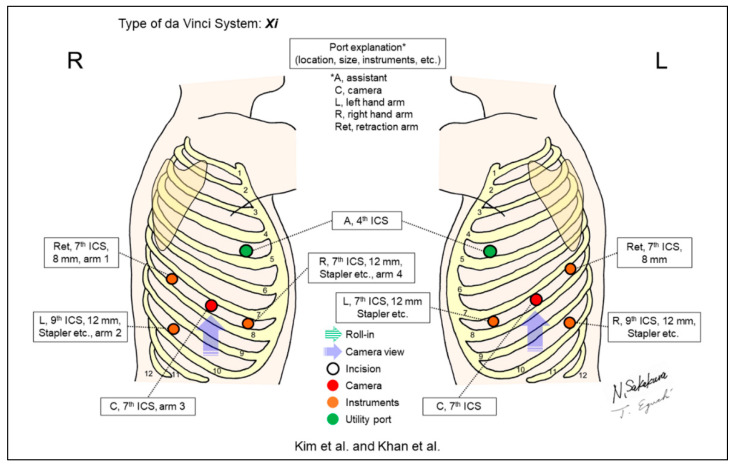
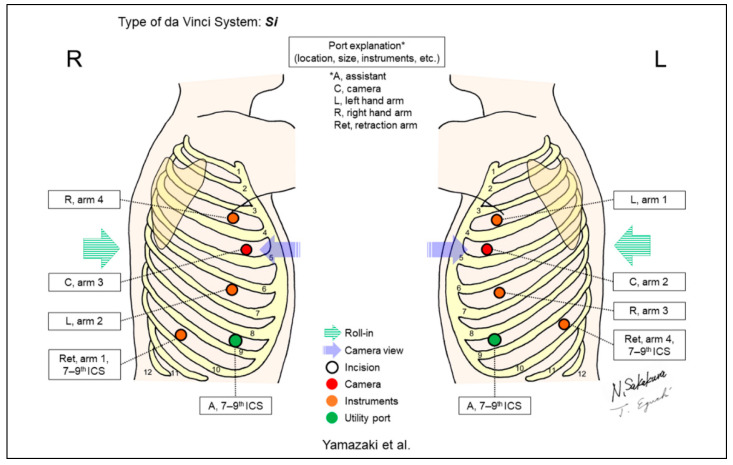
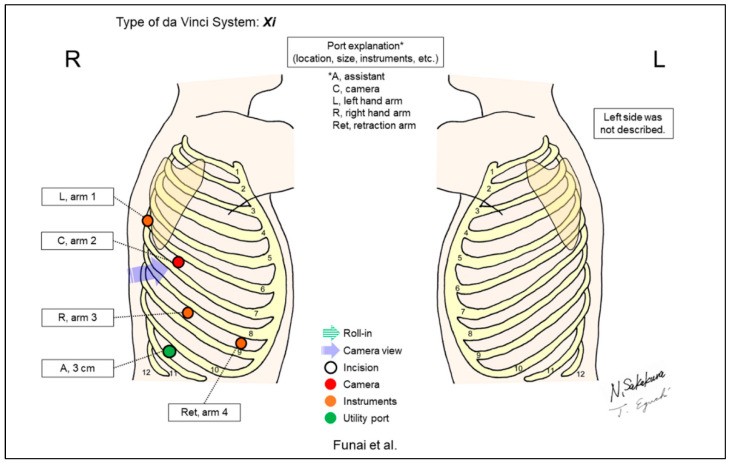
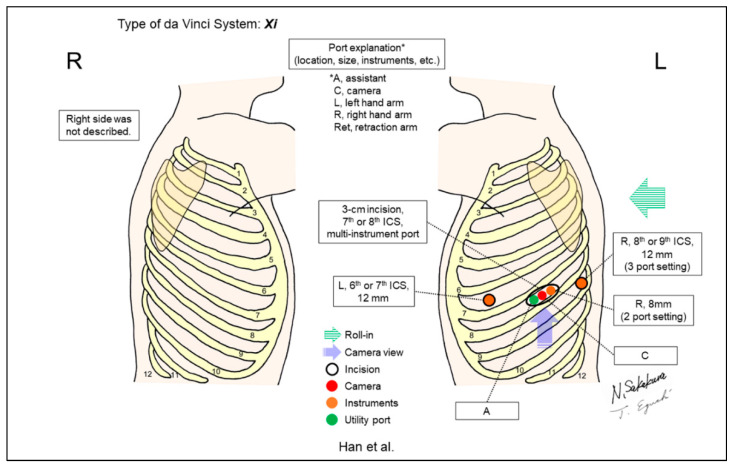
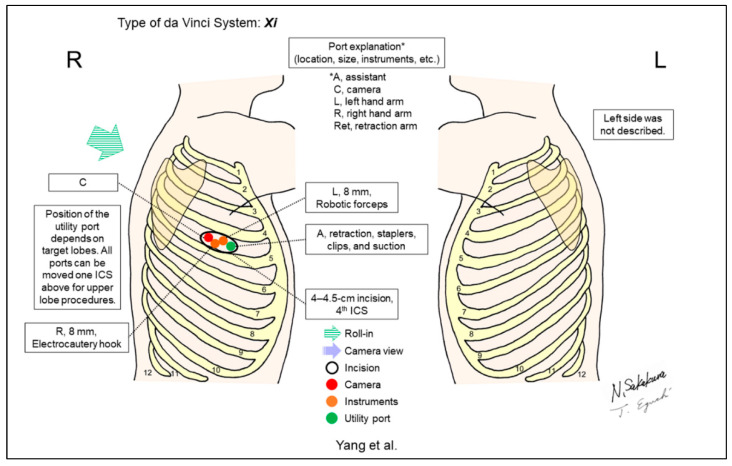
This is a narrative review that summarizes the variations in approaches and port placements used for performing robotic lung resections on the da Vinci Surgical Platforms. Currently, the four-arm, look-up-view method, in which the intrathoracic cranial side is viewed from the caudal side, is considered the mainstream approach worldwide. Several variations were devised from this conventional technique, including the so-called horizontal open-thoracotomy-view techniques in which the intrathoracic craniocaudal axis is aligned with the horizontal direction of the console monitor, and fewer port and incision techniques. In September 2022, 166 reports were surveyed using a PubMed English literature search, and this review finally included 30 reports describing the approaches. We categorized the variations into four-phase groups considering advent histories: (I) early era, three-arm technique with utility incisions; (II) four-arm, total port technique without robotic staplers; (III) four-arm technique using robotic staplers; (IV) maximizing the functional features of the Xi, significant alterations in viewing directions, and reducing ports, including the ultimate uniport technique. To comprehensibly visualize these variations for practical use, we created elaborate illustrations based on the literature. The familiarity of thoracic surgeons with the variations and characteristics allows them to choose the optimal procedure that best suits each patient and their preferences.
这是一篇叙述性综述,总结了在达芬奇手术平台上进行机器人肺切除术时所采用的方法和端口放置的变化。目前,从尾侧向头侧观察胸腔内颅侧的四臂、俯视视图方法被认为是全球主流方法。从这种传统技术衍生出了几种变体,包括所谓的水平开胸视图技术,即胸腔内的头尾轴与控制台监视器的水平方向对齐,以及较少端口和切口技术。2022年9月,通过PubMed英文文献检索对166篇报告进行了调查,本综述最终纳入了30篇描述这些方法的报告。考虑到出现的历史,我们将这些变体分为四个阶段组:(I)早期,带有实用切口的三臂技术;(II)四臂、无机器人吻合器的全端口技术;(III)使用机器人吻合器的四臂技术;(IV)最大化Xi的功能特性、显著改变观察方向以及减少端口,包括最终的单端口技术。为了在实际应用中全面直观地展示这些变体,我们根据文献制作了详细的插图。胸外科医生对这些变体和特征的熟悉程度使他们能够选择最适合每个患者及其偏好的最佳手术方法。