Sakakura Noriaki, Nakada Takeo, Shirai Suguru, Takahara Hirotomo, Nakanishi Keita, Matsui Takuya, Ueno Harushi, Takahashi Yusuke, Kuroda Hiroaki
Department of Thoracic Surgery, Aichi Cancer Center Hospital, Nagoya, Japan.
Interact Cardiovasc Thorac Surg. 2021 Jun 28;33(1):60-67. doi: 10.1093/icvts/ivab033.
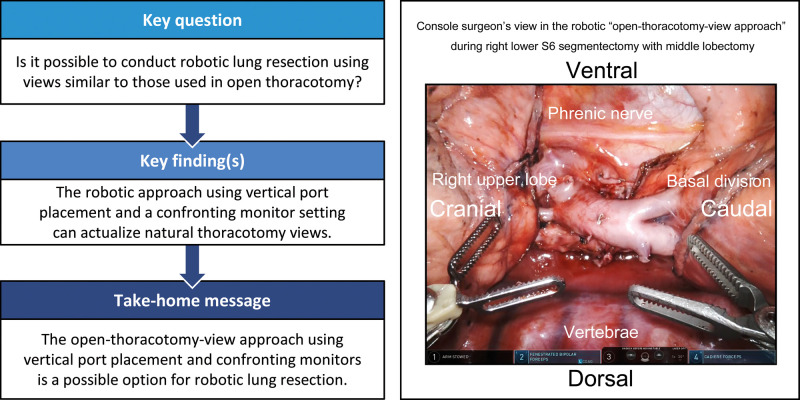
Robotic lung resections (RLRs) are conventionally performed using look-up views of the thorax from the caudal side. To conduct RLR with views similar to those in open thoracotomy, we adopted a vertical port placement and confronting upside-down monitor setting, which we called robotic 'open-thoracotomy-view approach'. We herein present our experience of this procedure.
We retrospectively reviewed 58 patients who underwent RLR (43 with lobectomy; 15 with segmentectomy) with 3-arm open-thoracotomy-view approach using the da Vinci Surgical System between February 2019 and October 2020. The patient cart was rolled in from the left cranial side of the patient regardless of the side to be operated on. Robotic ports were vertically placed along the axillary line, and 2 confronting monitors and 2 assistants were positioned on each side of the patient. The right-side monitor, which was set up for the left-side assistant to view, projected the upside-down image of the console surgeon's view.
All procedures were safely performed. The median duration of surgery and console operation was 215 and 164 min, respectively. Emergency conversion into thoracotomy and severe morbidities did not occur, and the median postoperative hospitalization duration was 3 days. In all procedures, the console surgeon and 2 assistants had direct 'bird-eye' views of the cranially located intrathoracic structures and instrument tips, which are sometimes undetectable with the conventional look-up view.
The open-thoracotomy-view approach setting is a possible option for RLR. It offers natural thoracotomy views and can circumvent some of the known limitations of the conventional procedure.
传统的机器人肺切除术(RLR)是从尾侧使用胸部的查找视图进行的。为了以类似于开胸手术的视图进行RLR,我们采用了垂直端口放置和倒置显示器设置,我们称之为机器人“开胸手术视图方法”。在此,我们介绍我们在该手术中的经验。
我们回顾性分析了2019年2月至2020年10月期间使用达芬奇手术系统采用三臂开胸手术视图方法进行RLR的58例患者(43例行肺叶切除术;15例行肺段切除术)。无论手术侧别如何,患者推车都从患者的左头侧推入。机器人端口沿腋前线垂直放置,2个相对的显示器和2名助手分别位于患者两侧。为左侧助手设置的右侧显示器投射了主刀医生视图的倒置图像。
所有手术均安全完成。手术和主刀操作的中位持续时间分别为215分钟和164分钟。未发生紧急开胸转换和严重并发症,术后中位住院时间为3天。在所有手术中,主刀医生和2名助手对位于头侧的胸内结构和器械尖端有直接的“鸟瞰”视图,而这些在传统的查找视图中有时是无法检测到的。
开胸手术视图方法设置是RLR的一种可行选择。它提供了自然的开胸手术视图,并且可以规避传统手术的一些已知局限性。