Zheng Zhiqiang, Han Jie, Demir Sinan Ozgun, Wang Huaping, Jiang Weitao, Liu Hongzhong, Sitti Metin
Physical Intelligence Department, Max Planck Institute for Intelligent Systems, 70569, Stuttgart, Germany.
State Key Laboratory for Manufacturing Systems Engineering, Xi'an Jiaotong University, Xi'an, 710054, China.
Adv Sci (Weinh). 2023 Aug;10(23):e2302409. doi: 10.1002/advs.202302409. Epub 2023 Jun 8.
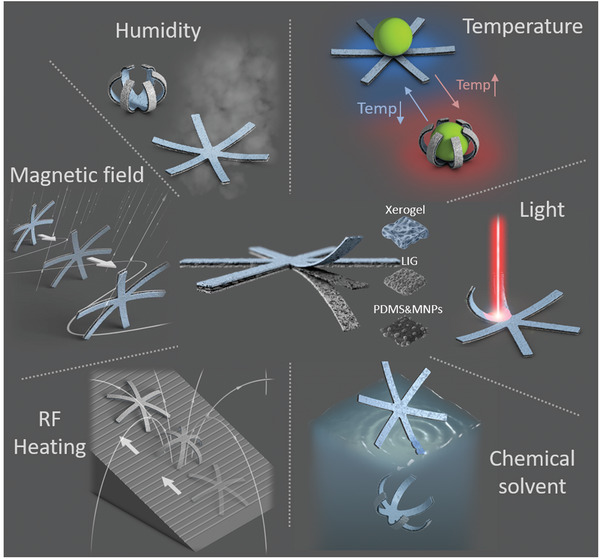
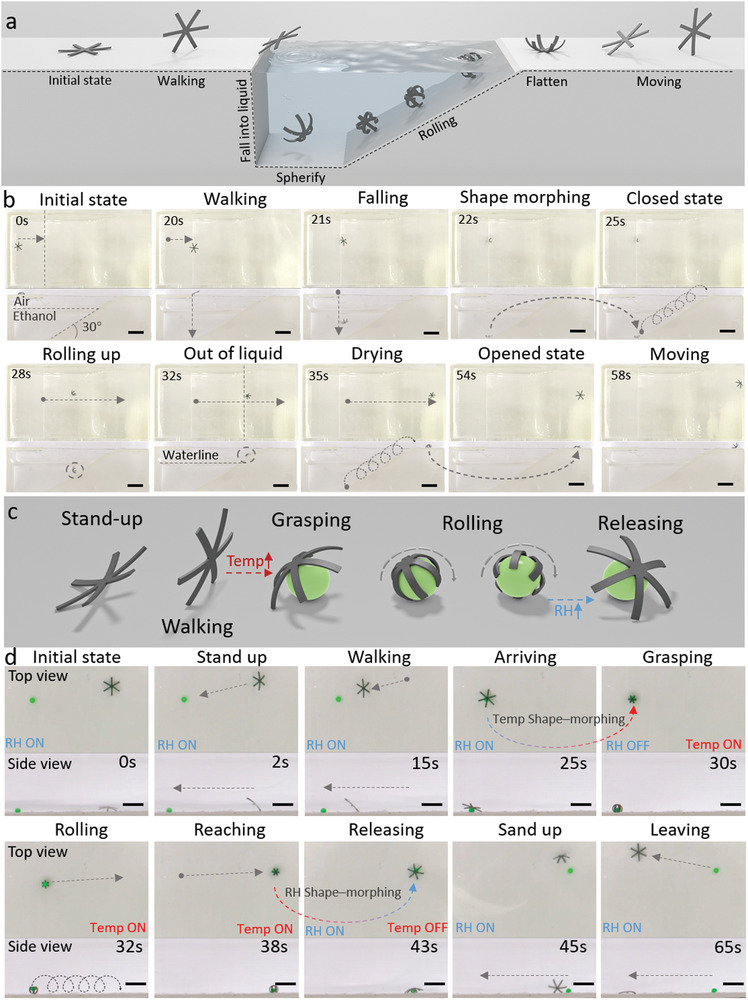
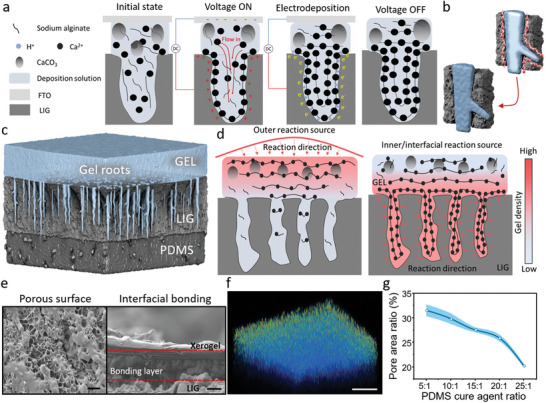
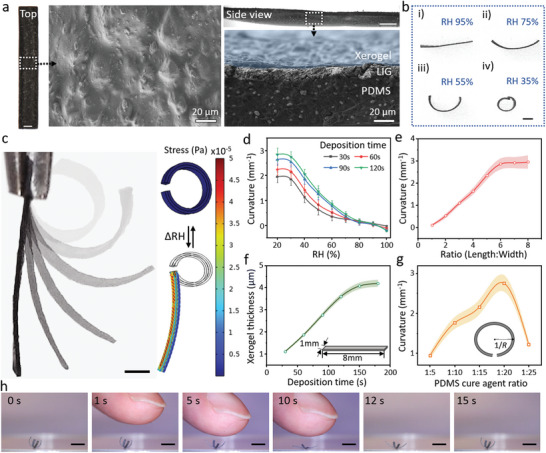
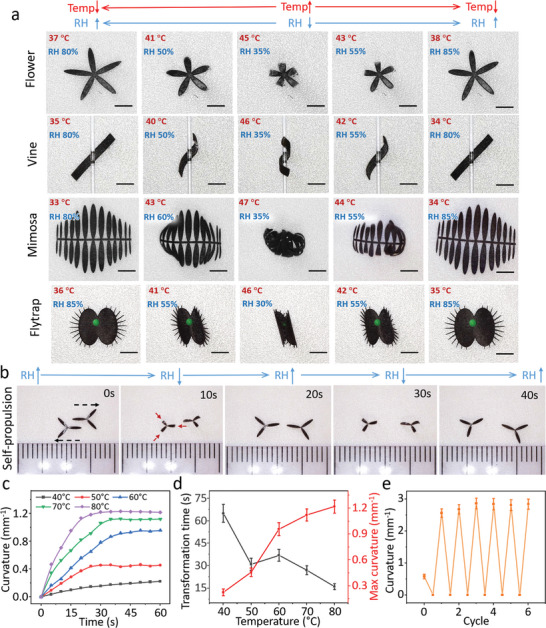
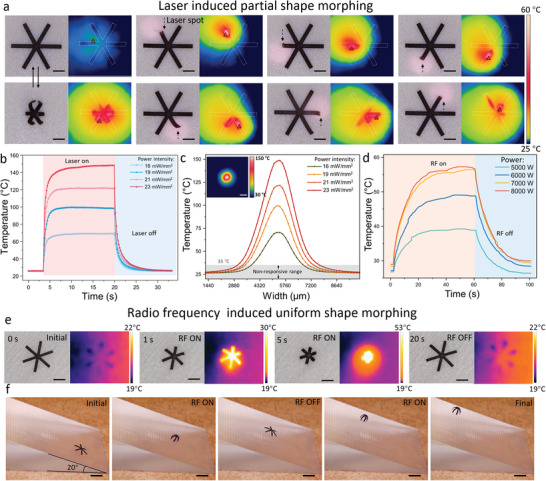
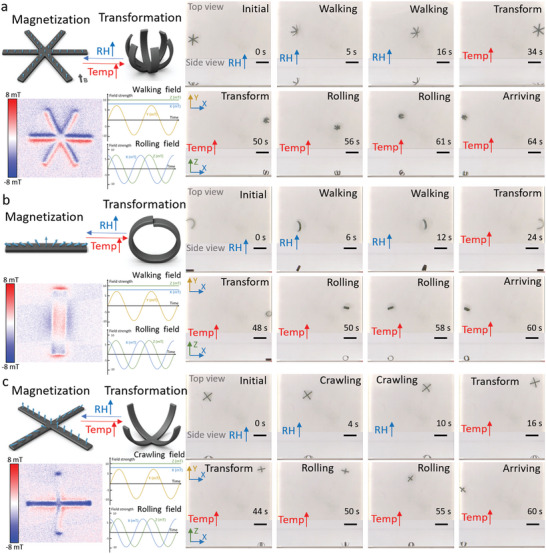
To navigate in complex and unstructured real-world environments, soft miniature robots need to possess multiple functions, including autonomous environmental sensing, self-adaptation, and multimodal locomotion. However, to achieve multifunctionality, artificial soft robots should respond to multiple stimuli, which can be achieved by multimaterial integration using facile and flexible fabrication methods. Here, a multimaterial integration strategy for fabricating soft millirobots that uses electrodeposition to integrate two inherently non-adherable materials, superhydrophilic hydrogels and superhydrophobic elastomers, together via gel roots is proposed. This approach enables the authors to electrodeposit sodium alginate hydrogel onto a laser-induced graphene-coated elastomer, which can then be laser cut into various shapes to function as multi-stimuli-responsive soft robots (MSRs). Each MSR can respond to six different stimuli to autonomously transform their shapes, and mimic flowers, vines, mimosas, and flytraps. It is demonstrated that MSRs can climb slopes, switch locomotion modes, self-adapt between air-liquid environments, and transport cargo between different environments. This multimaterial integration strategy enables creating untethered soft millirobots that have multifunctionality, such as environmental sensing, self-propulsion, and self-adaptation, paving the way for their future operation in complex real-world environments.
为了在复杂且无结构的现实世界环境中导航,软微型机器人需要具备多种功能,包括自主环境感知、自适应和多模态运动。然而,要实现多功能性,人造软机器人应能对多种刺激做出反应,这可以通过使用简便且灵活的制造方法进行多材料集成来实现。在此,提出了一种用于制造软微型机器人的多材料集成策略,该策略利用电沉积通过凝胶根将两种本质上不粘附的材料,即超亲水水凝胶和超疏水弹性体集成在一起。这种方法使作者能够将海藻酸钠水凝胶电沉积到激光诱导石墨烯涂层的弹性体上,然后可以将其激光切割成各种形状,以用作多刺激响应软机器人(MSR)。每个MSR可以对六种不同的刺激做出反应,以自主改变其形状,并模仿花朵、藤蔓、含羞草和捕蝇草。结果表明,MSR可以爬坡、切换运动模式、在气液环境之间自适应,并在不同环境之间运输货物。这种多材料集成策略能够制造出具有多功能性(如环境感知、自我推进和自适应)的无缆软微型机器人,为它们未来在复杂现实世界环境中的运行铺平了道路。