Greenspon Charles M, Shelchkova Natalya D, Valle Giacomo, Hobbs Taylor G, Berger-Wolf Ev I, Hutchison Brianna C, Dogruoz Efe, Verbarschott Ceci, Callier Thierri, Sobinov Anton R, Okorokova Elizaveta V, Jordan Patrick M, Prasad Dillan, He Qinpu, Liu Fang, Kirsch Robert F, Miller Jonathan P, Lee Ray C, Satzer David, Gonzalez-Martinez Jorge, Warnke Peter C, Miller Lee E, Boninger Michael L, Ajiboye Abidemi B, Graczyk Emily L, Downey John E, Collinger Jennifer L, Hatsopoulos Nicholas G, Gaunt Robert A, Bensmaia Sliman J
Department of Organismal Biology and Anatomy, University of Chicago, Chicago, IL.
Committee on Computational Neuroscience, University of Chicago, Chicago, IL.
bioRxiv. 2023 Jul 15:2023.06.23.545425. doi: 10.1101/2023.06.23.545425.
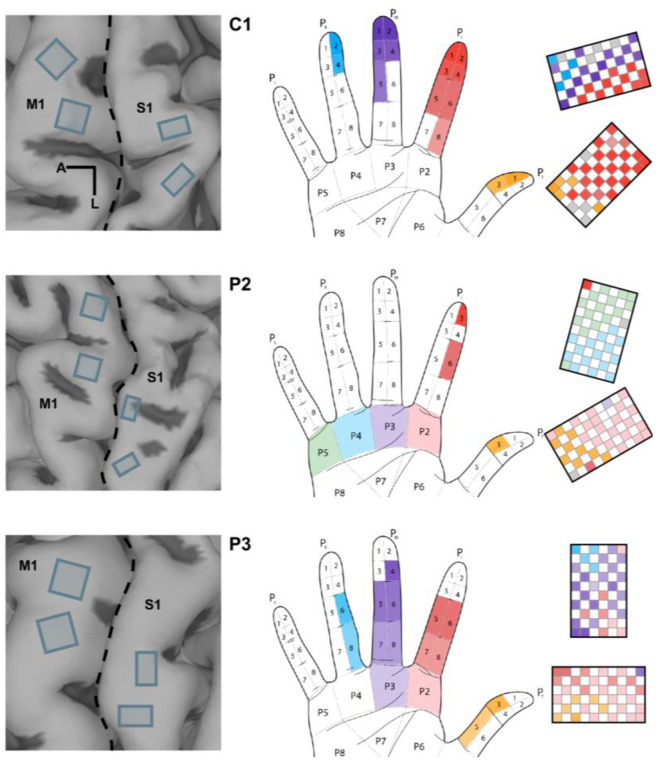
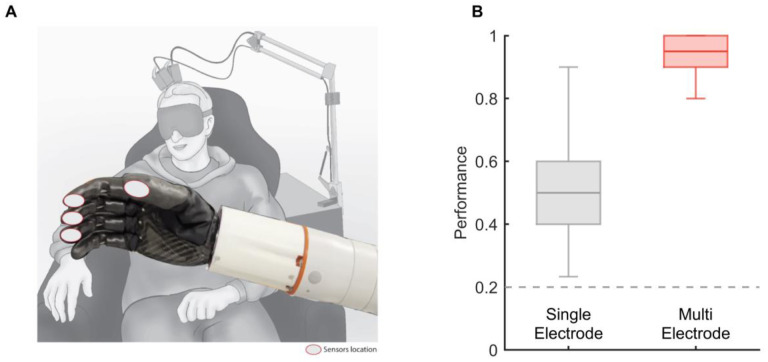
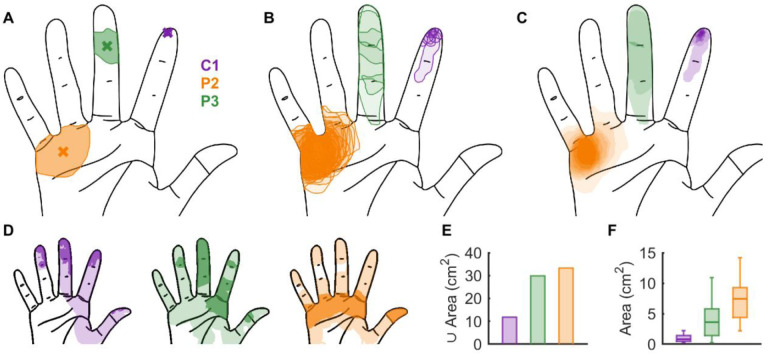
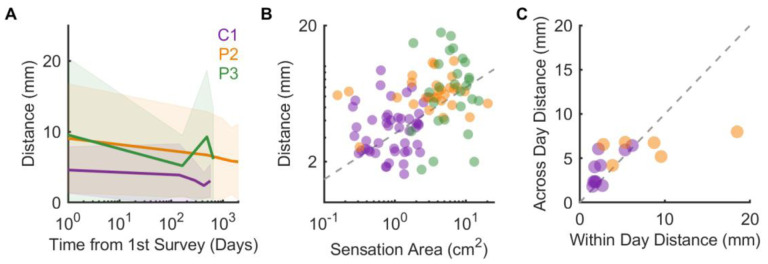
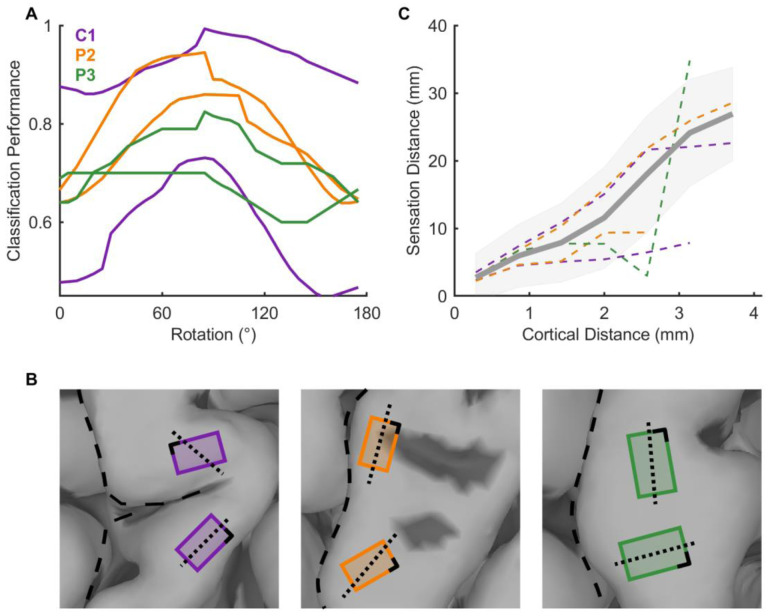
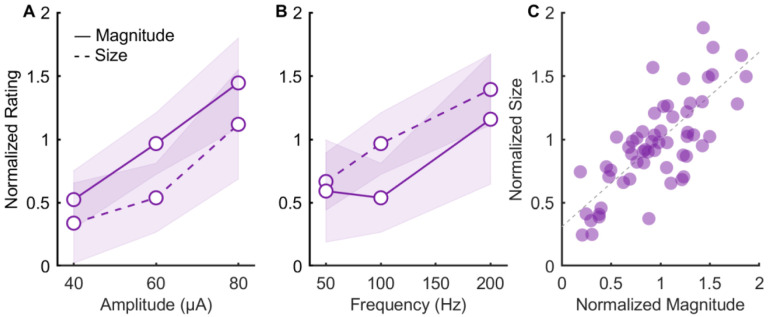
When we interact with objects, we rely on signals from the hand that convey information about the object and our interaction with it. A basic feature of these interactions, the locations of contacts between the hand and object, is often only available via the sense of touch. Information about locations of contact between a brain-controlled bionic hand and an object can be signaled via intracortical microstimulation (ICMS) of somatosensory cortex (S1), which evokes touch sensations that are localized to a specific patch of skin. To provide intuitive location information, tactile sensors on the robotic hand drive ICMS through electrodes that evoke sensations at skin locations matching sensor locations. This approach requires that ICMS-evoked sensations be focal, stable, and distributed over the hand. To systematically investigate the localization of ICMS-evoked sensations, we analyzed the projected fields (PFs) of ICMS-evoked sensations - their location and spatial extent - from reports obtained over multiple years from three participants implanted with microelectrode arrays in S1. First, we found that PFs vary widely in their size across electrodes, are highly stable within electrode, are distributed over large swaths of each participant's hand, and increase in size as the amplitude or frequency of ICMS increases. Second, while PF locations match the locations of the receptive fields (RFs) of the neurons near the stimulating electrode, PFs tend to be subsumed by the corresponding RFs. Third, multi-channel stimulation gives rise to a PF that reflects the conjunction of the PFs of the component channels. By stimulating through electrodes with largely overlapping PFs, then, we can evoke a sensation that is experienced primarily at the intersection of the component PFs. To assess the functional consequence of this phenomenon, we implemented multichannel ICMS-based feedback in a bionic hand and demonstrated that the resulting sensations are more localizable than are those evoked via single-channel ICMS.
当我们与物体互动时,我们依赖于来自手部的信号,这些信号传达了有关物体以及我们与它互动的信息。这些互动的一个基本特征,即手部与物体之间的接触位置,通常只能通过触觉来获取。关于脑控仿生手与物体之间接触位置的信息,可以通过对体感皮层(S1)进行皮层内微刺激(ICMS)来发出信号,这种刺激会引发局限于特定皮肤区域的触觉感受。为了提供直观的位置信息,机器人手上的触觉传感器通过电极驱动ICMS,在与传感器位置相匹配的皮肤位置引发感觉。这种方法要求ICMS引发的感觉是局部的、稳定的,并且分布在整个手部。为了系统地研究ICMS引发感觉的定位,我们分析了ICMS引发感觉的投射场(PFs)——它们的位置和空间范围——这些数据来自于多年来对三名在S1植入微电极阵列的参与者的报告。首先,我们发现PFs在不同电极上的大小差异很大,在单个电极内高度稳定,分布在每个参与者手部的大片区域,并且随着ICMS的幅度或频率增加而增大。其次,虽然PF位置与刺激电极附近神经元的感受野(RFs)位置相匹配,但PF往往被相应的RF所包含。第三,多通道刺激会产生一个PF,它反映了各个组成通道PF的交集。通过在具有大量重叠PF的电极上进行刺激,我们可以引发一种主要在组成PF的交集处感受到的感觉。为了评估这种现象的功能后果,我们在仿生手中实现了基于多通道ICMS的反馈,并证明由此产生的感觉比单通道ICMS引发的感觉更易于定位。