College of Information and Control Engineering, Xi'an University of Architecture and Technology, Xi'an 710311, China.
School of Marine Science and Technology, Northwestern Polytechnical University, Xi'an 710072, China.
Sensors (Basel). 2023 May 20;23(10):4926. doi: 10.3390/s23104926.
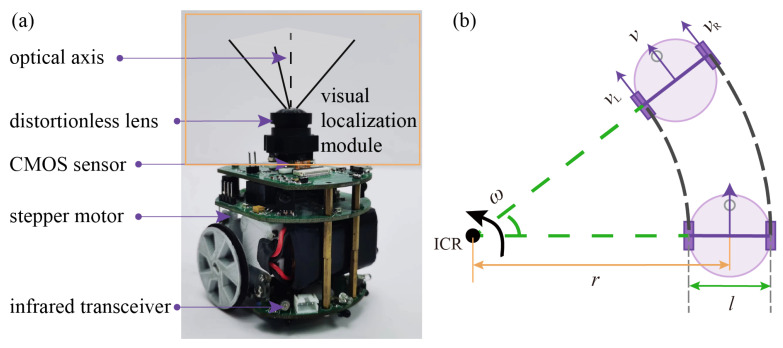
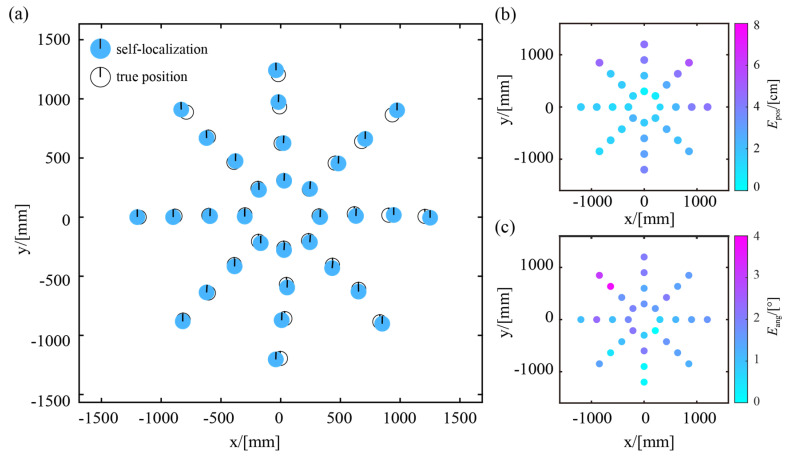
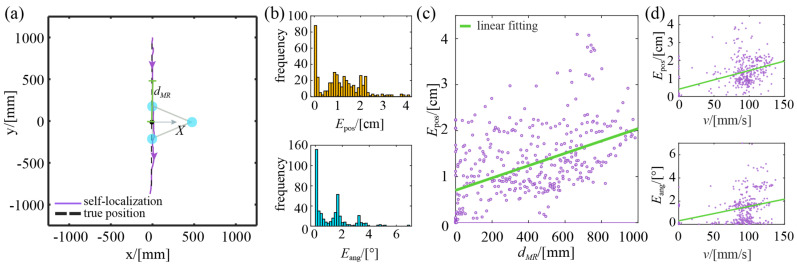
When performing indoor tasks, miniature swarm robots are suffered from their small size, poor on-board computing power, and electromagnetic shielding of buildings, which means that some traditional localization methods, such as global positioning system (GPS), simultaneous localization and mapping (SLAM), and ultra-wideband (UWB), cannot be employed. In this paper, a minimalist indoor self-localization approach for swarm robots is proposed based on active optical beacons. A robotic navigator is introduced into a swarm of robots to provide locally localization services by actively projecting a customized optical beacon on the indoor ceiling, which contains the origin and the reference direction of localization coordinates. The swarm robots observe the optical beacon on the ceiling via a bottom-up-view monocular camera, and extract the beacon information on-board to localize their positions and headings. The uniqueness of this strategy is that it uses the flat, smooth, and well-reflective ceiling in the indoor environment as a ubiquitous plane for displaying the optical beacon; meanwhile, the bottom-up view of swarm robots is not easily blocked. Real robotic experiments are conducted to validate and analyze the localization performance of the proposed minimalist self-localization approach. The results show that our approach is feasible and effective, and can meet the needs of swarm robots to coordinate their motion. Specifically, for the stationary robots, the average position error and heading error are 2.41 cm and 1.44°; when the robots are moving, the average position error and heading error are less than 2.40 cm and 2.66°.
当执行室内任务时,微型群体机器人受到其体积小、板载计算能力差以及建筑物的电磁屏蔽的限制,这意味着一些传统的定位方法,如全球定位系统(GPS)、同时定位与地图构建(SLAM)和超宽带(UWB),无法使用。本文提出了一种基于主动光学信标的微型群体机器人极简室内自定位方法。引入机器人导航器到机器人群中,通过主动在室内天花板上投射定制的光学信标,提供本地定位服务,该信标包含定位坐标的原点和参考方向。群体机器人通过底部视角单目相机观察天花板上的光学信标,并提取信标信息以定位其位置和航向。该策略的独特之处在于,它利用室内环境中的平坦、光滑且高度反射的天花板作为显示光学信标的无处不在的平面;同时,群体机器人的底部视角不易被遮挡。进行了真实的机器人实验,以验证和分析所提出的极简自定位方法的定位性能。结果表明,我们的方法是可行且有效的,能够满足群体机器人协调运动的需求。具体来说,对于静止的机器人,平均位置误差和航向误差分别为 2.41 厘米和 1.44°;当机器人移动时,平均位置误差和航向误差小于 2.40 厘米和 2.66°。