Rott Relindis, Ritter David J, Ladstätter Stefan, Nikolić Oliver, Hennecke Marcus E
Virtual Vehicle Research GbmH, 8010 Graz, Austria.
Joanneum Research-Digital Twin Lab, 9020 Klagenfurt, Austria.
Sensors (Basel). 2024 Mar 13;24(6):1846. doi: 10.3390/s24061846.
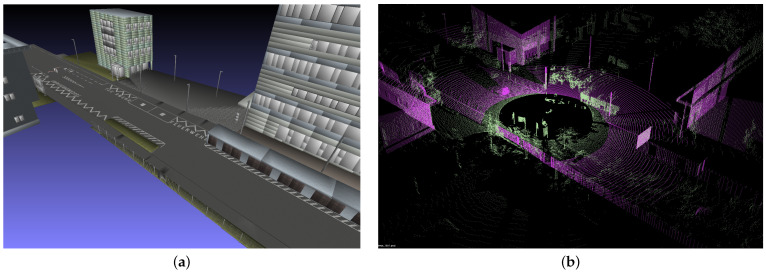
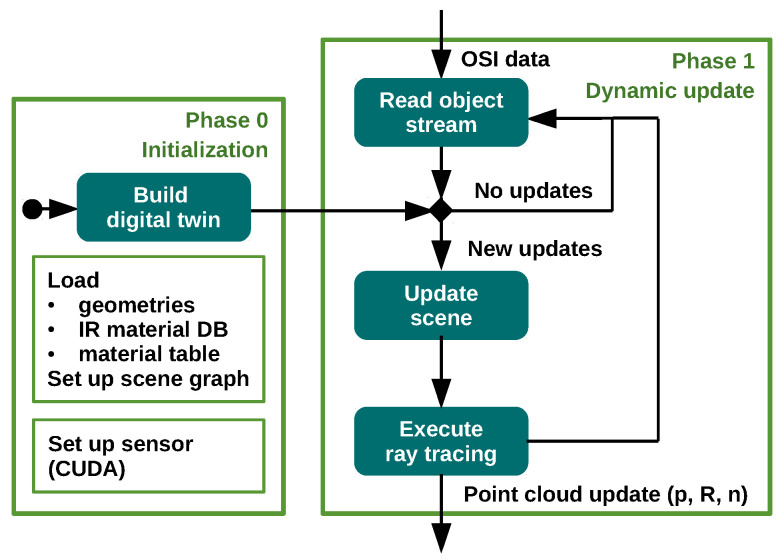
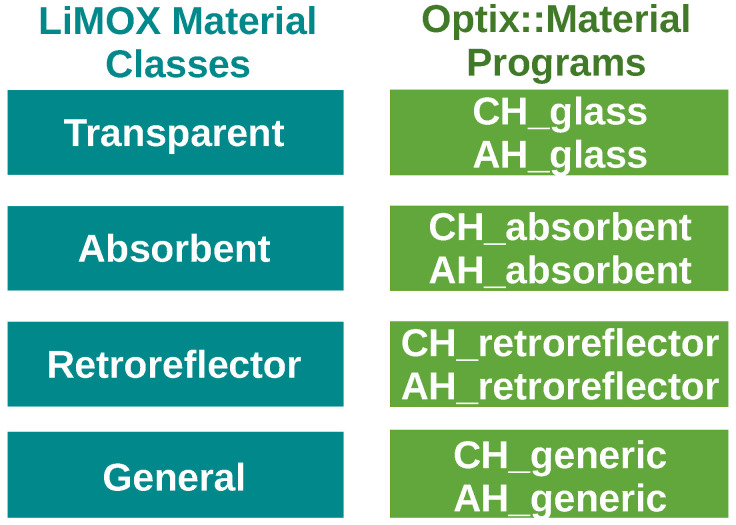
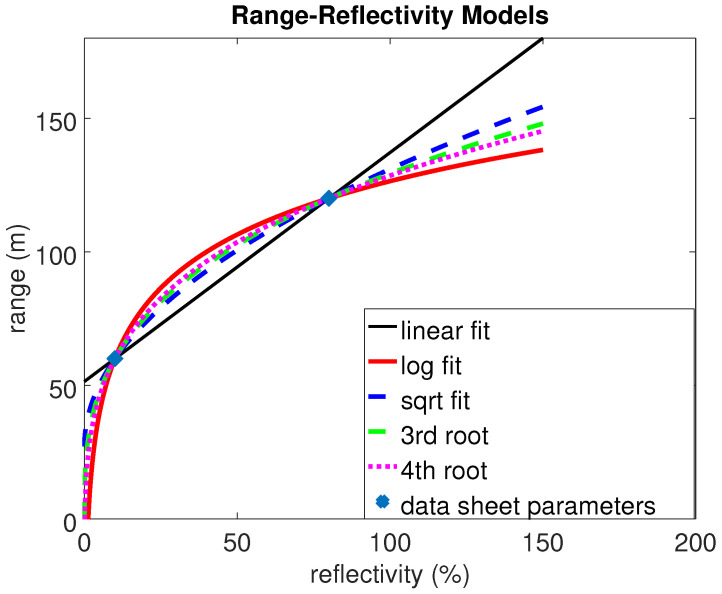
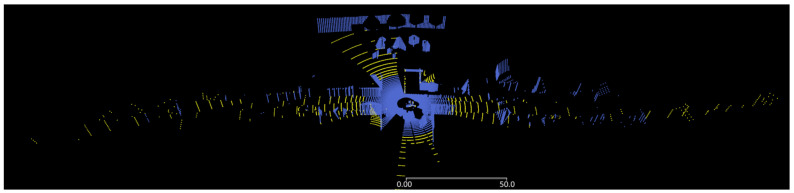
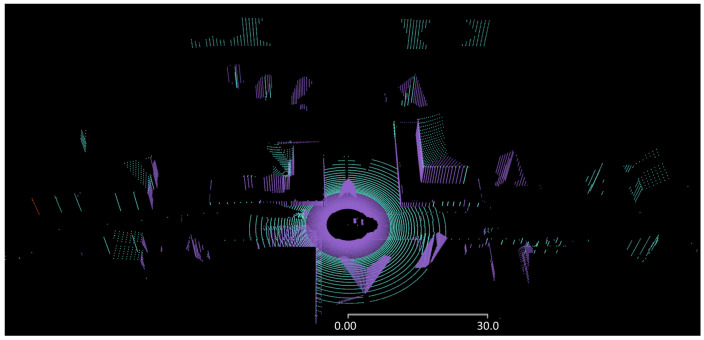
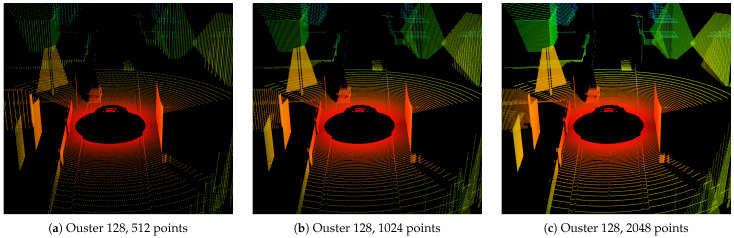
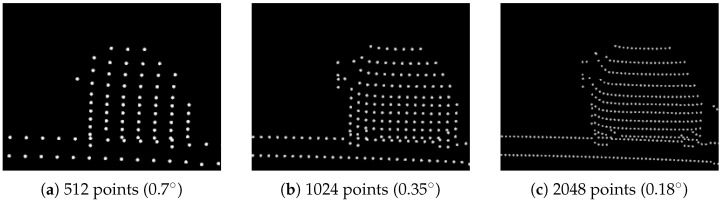
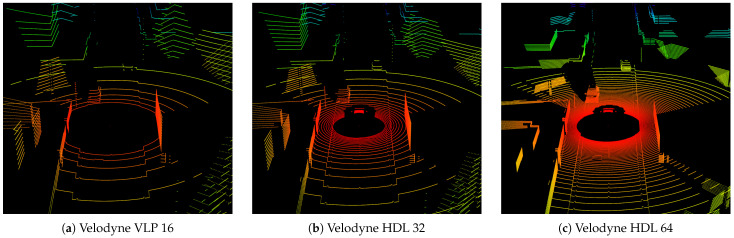
Virtual testing and validation are building blocks in the development of autonomous systems, in particular autonomous driving. Perception sensor models gained more attention to cover the entire tool chain of the sense-plan-act cycle, in a realistic test setup. In the literature or state-of-the-art software tools various kinds of lidar sensor models are available. We present a point cloud lidar sensor model, based on ray tracing, developed for a modular software architecture, which can be used stand-alone. The model is highly parametrizable and designed as a toolbox to simulate different kinds of lidar sensors. It is linked to an infrared material database to incorporate physical sensor effects introduced by the ray-surface interaction. The maximum detectable range depends on the material reflectivity, which can be covered with this approach. The angular dependence and maximum range for different Lambertian target materials are studied. Point clouds from a scene in an urban street environment are compared for different sensor parameters.
虚拟测试和验证是自主系统开发的基石,尤其是自动驾驶领域。在实际测试设置中,感知传感器模型在覆盖感知-规划-行动循环的整个工具链方面受到了更多关注。在文献或现有软件工具中,有各种各样的激光雷达传感器模型。我们提出了一种基于光线追踪的点云激光雷达传感器模型,该模型是为模块化软件架构开发的,可单独使用。该模型具有高度可参数化性,被设计为一个工具箱,用于模拟不同类型的激光雷达传感器。它与一个红外材料数据库相连,以纳入光线与表面相互作用所引入的物理传感器效应。最大可探测范围取决于材料的反射率,这种方法可以涵盖这一点。研究了不同朗伯目标材料的角度依赖性和最大范围。针对不同的传感器参数,比较了城市街道环境中一个场景的点云。