Inostroza Felipe, Parra-Tsunekawa Isao, Ruiz-Del-Solar Javier
Advanced Mining Technology Center, Universidad de Chile, Santiago 8370451, Chile.
Department of Electrical Engineering, Universidad de Chile, Santiago 8370451, Chile.
Sensors (Basel). 2023 Sep 24;23(19):8059. doi: 10.3390/s23198059.
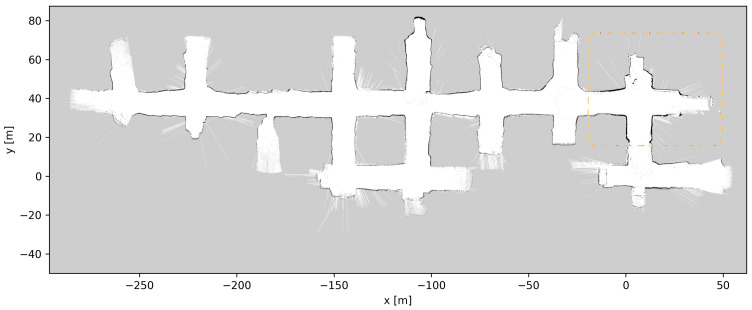
Most autonomous navigation systems used in underground mining vehicles such as load-haul-dump (LHD) vehicles and trucks use 2D light detection and ranging (LIDAR) sensors and 2D representations/maps of the environment. In this article, we propose the use of 3D LIDARs and existing 3D simultaneous localization and mapping (SLAM) jointly with 2D mapping methods to produce or update 2D grid maps of underground tunnels that may have significant elevation changes. Existing mapping methods that only use 2D LIDARs are shown to fail to produce accurate 2D grid maps of the environment. These maps can be used for robust localization and navigation in different mine types (e.g., sublevel stoping, block/panel caving, room and pillar), using only 2D LIDAR sensors. The proposed methodology was tested in the Werra Potash Mine located at Philippsthal, Germany, under real operational conditions. The obtained results show that the enhanced 2D map-building method produces a superior mapping performance compared with a 2D map generated without the use of the 3D LIDAR-based mapping solution. The 2D map generated enables robust 2D localization, which was tested during the operation of an autonomous LHD, performing autonomous navigation and autonomous loading over extended periods of time.
大多数用于地下采矿车辆(如铲运机和卡车)的自主导航系统使用二维激光雷达传感器和环境的二维表示/地图。在本文中,我们建议将三维激光雷达与现有的三维同步定位与地图构建(SLAM)技术与二维绘图方法结合使用,以生成或更新可能存在显著高程变化的地下隧道的二维网格地图。结果表明,仅使用二维激光雷达的现有绘图方法无法生成准确的环境二维网格地图。这些地图可用于不同类型矿山(如分段崩落法、矿块/盘区崩落法、房柱法)中的稳健定位和导航,仅使用二维激光雷达传感器即可。所提出的方法在德国菲利普斯塔尔的韦拉钾盐矿的实际运行条件下进行了测试。所得结果表明,与不使用基于三维激光雷达的绘图解决方案生成的二维地图相比,增强后的二维地图构建方法具有更好的绘图性能。生成的二维地图能够实现稳健的二维定位,这在自主铲运机的运行过程中进行了测试,该铲运机在较长时间内执行自主导航和自主装载任务。