Zhou Jingchuan, Xu Dacheng, Li Xinxin, Chen Fang
State Key Laboratory of Transducer Technology, Shanghai Institute of Microsystem and Information Technology, Chinese Academy of Sciences, Shanghai 200050, China.
University of Chinese Academy of Sciences, Beijing 100049, China.
Micromachines (Basel). 2024 Jan 11;15(1):124. doi: 10.3390/mi15010124.
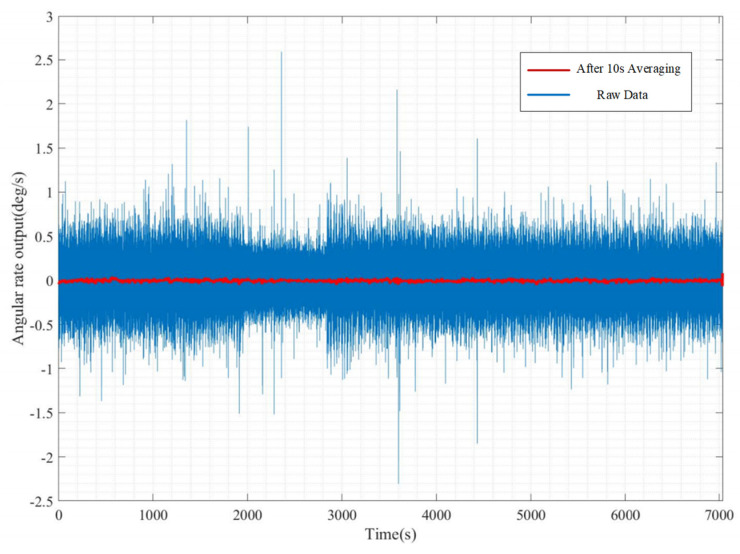
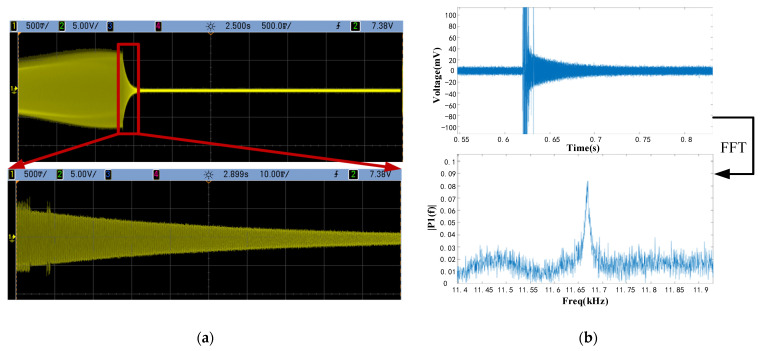
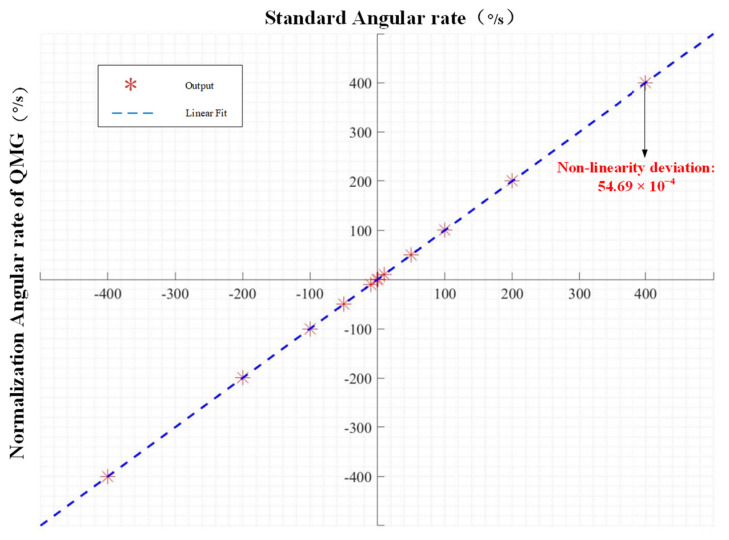
In this work, a novel mechanical amplification structure for a MEMS vibratory gyroscope is proposed with the aim of improving their sensitivity. The scheme is implemented using a system of micromachined V-shaped springs as a deflection amplifying mechanism. The effectiveness of the mechanism is first demonstrated for a capacitive fully decoupled quad mass gyroscope. A proof of concept vertical-axis mechanically amplified gyroscope with an amplification factor of 365% has been designed, simulated and fabricated, and results from its evaluation are presented in this paper. Experimental results show that the natural frequency of the gyroscope is 11.67 KHz, and the full scale measurement range is up to ±400°/s with a maximum nonlinearity of 54.69 ppm. The bias stability is 44.53°/h. The experiment results show that this quad mass gyroscope's performance is a very potential new way of reaching the navigation grade in the future.
在这项工作中,为提高MEMS振动陀螺仪的灵敏度,提出了一种新型机械放大结构。该方案通过微机械加工的V形弹簧系统作为偏转放大机构来实现。首先在电容式全解耦四质量陀螺仪上验证了该机构的有效性。设计、模拟并制作了放大倍数为365%的概念验证垂直轴机械放大陀螺仪,并在本文中给出了其评估结果。实验结果表明,该陀螺仪的固有频率为11.67KHz,满量程测量范围高达±400°/s,最大非线性度为54.69ppm。偏置稳定性为44.53°/h。实验结果表明,这种四质量陀螺仪的性能是未来达到导航级的一种非常有潜力的新途径。