Mazzarini Alessandro, Fantozzi Matteo, Papapicco Vito, Fagioli Ilaria, Lanotte Francesco, Baldoni Andrea, Dell'Agnello Filippo, Ferrara Paolo, Ciapetti Tommaso, Molino Lova Raffaele, Gruppioni Emanuele, Trigili Emilio, Crea Simona, Vitiello Nicola
The BioRobotics Institute, Scuola Superiore Sant'Anna, Pisa, Italy.
Department of Excellence in Robotics & AI, Scuola Superiore Sant'Anna, Pisa, Italy.
Wearable Technol. 2023 Jun 15;4:e18. doi: 10.1017/wtc.2023.13. eCollection 2023.
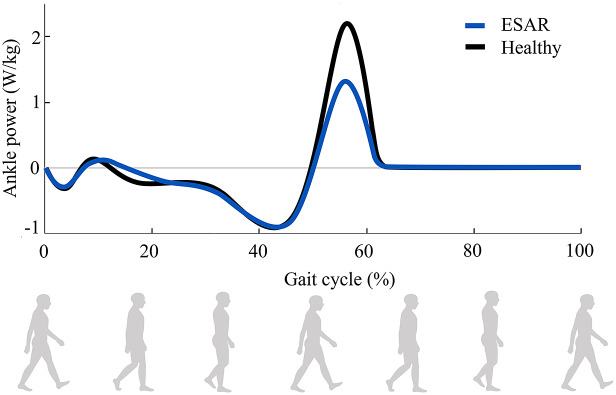
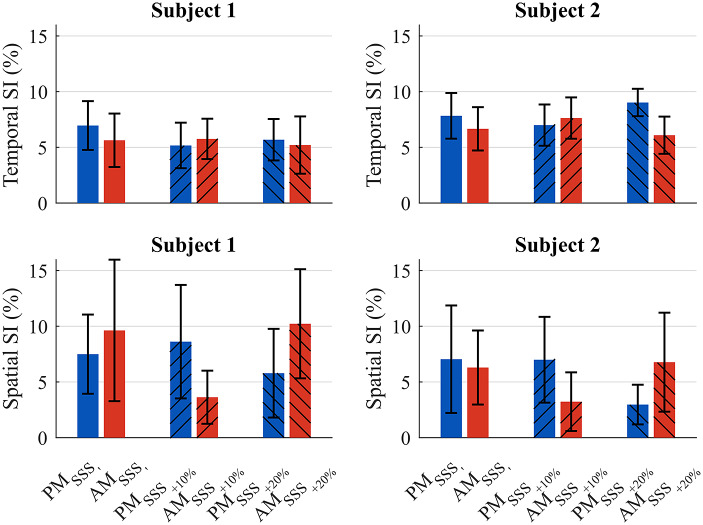
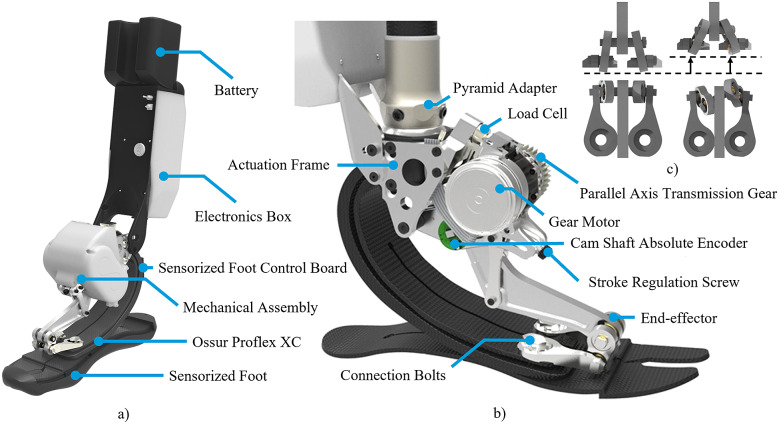
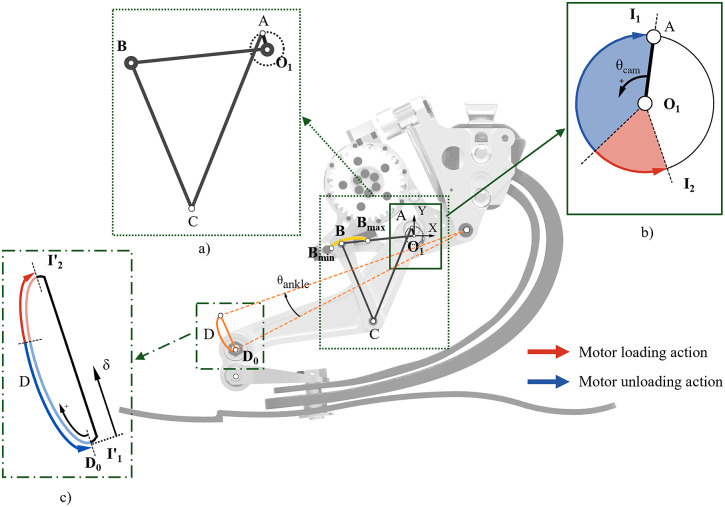
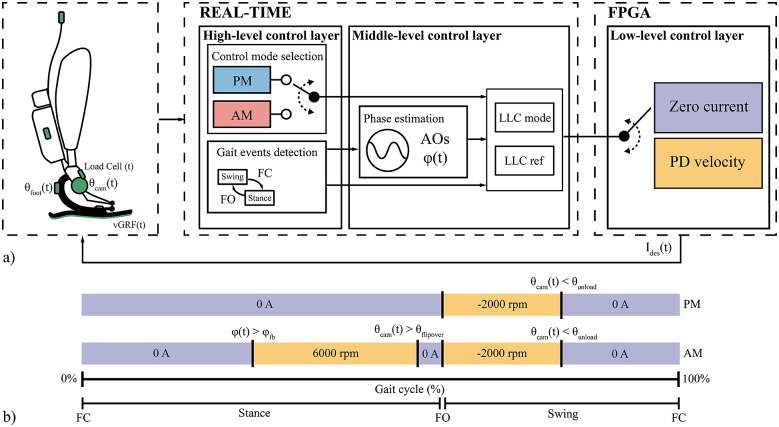
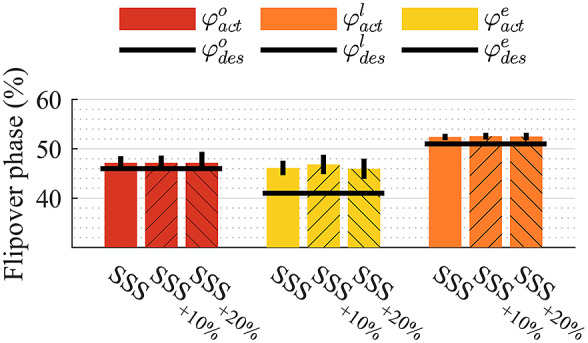
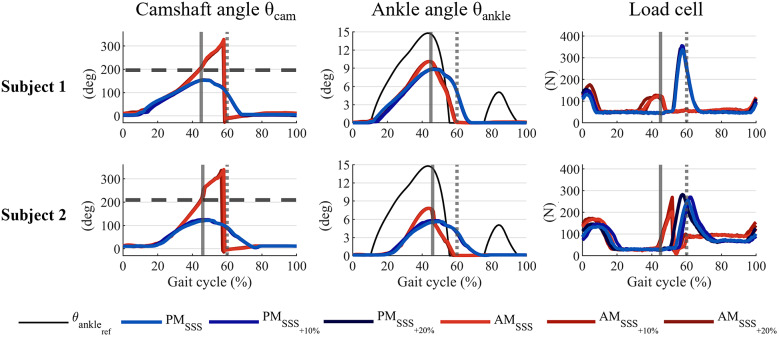
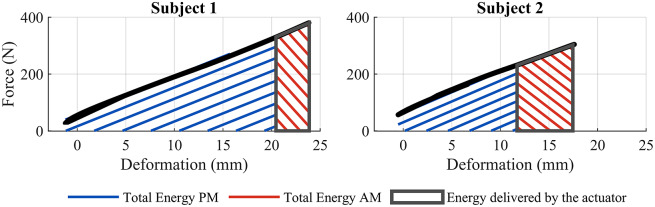
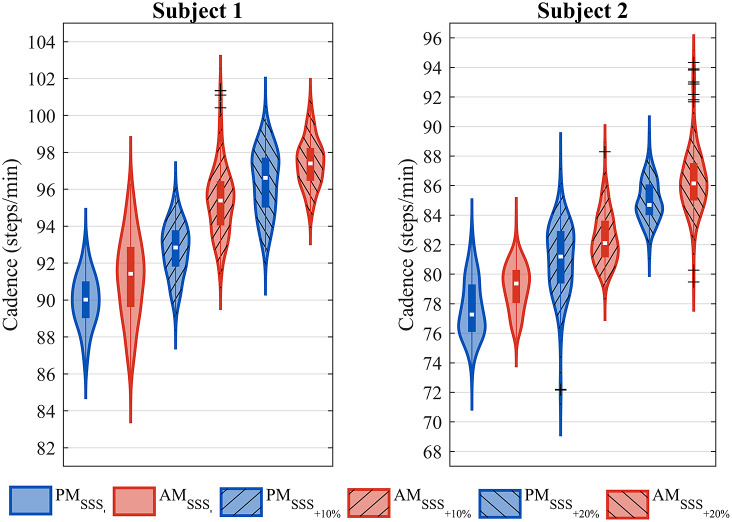
Passive ankle-foot prostheses are light-weighted and reliable, but they cannot generate net positive power, which is essential in restoring the natural gait pattern of amputees. Recent robotic prostheses addressed the problem by actively controlling the storage and release of energy generated during the stance phase through the mechanical deformation of elastic elements housed in the device. This study proposes an innovative low-power active prosthetic module that fits on off-the-shelf passive ankle-foot energy-storage-and-release (ESAR) prostheses. The module is placed parallel to the ESAR foot, actively augmenting the energy stored in the foot and controlling the energy return for an enhanced push-off. The parallel elastic actuation takes advantage of the amputee's natural loading action on the foot's elastic structure, retaining its deformation. The actuation unit is designed to additionally deform the foot and command the return of the total stored energy. The control strategy of the prosthesis adapts to changes in the user's cadence and loading conditions to return the energy at a desired stride phase. An early verification on two transtibial amputees during treadmill walking showed that the proposed mechanism could increase the subjects' dorsiflexion peak of 15.2% and 41.6% for subjects 1 and 2, respectively, and the cadence of about 2%. Moreover, an increase of 26% and 45% was observed in the energy return for subjects 1 and 2, respectively.
被动式踝足假肢轻便可靠,但无法产生净正功率,而这对于恢复截肢者的自然步态模式至关重要。最近的机器人假肢通过机械装置中弹性元件的机械变形,主动控制站立阶段产生的能量的存储和释放,从而解决了这一问题。本研究提出了一种创新的低功耗主动假肢模块,该模块适用于现成的被动式踝足能量存储与释放(ESAR)假肢。该模块与ESAR足部平行放置,可主动增加存储在足部的能量,并控制能量返回以增强蹬离动作。平行弹性驱动利用了截肢者对足部弹性结构的自然加载动作,并保持其变形。驱动单元旨在使足部额外变形,并控制总存储能量的返回。假肢的控制策略可适应使用者步频和负载条件的变化,以便在期望的步幅阶段返回能量。对两名经胫截肢者在跑步机上行走时进行的初步验证表明,所提出的机制可使受试者1和受试者2的背屈峰值分别增加15.2%和41.6%,步频增加约2%。此外,受试者1和受试者2的能量返回分别增加了26%和45%。