Oesophago-Gastric and Bariatric Surgical Unit, Department of General Surgery, The Alfred Hospital, Melbourne, VIC, Australia.
Department of Surgery, Central Clinical School, Monash University, 55 Commercial Road, Melbourne, VIC, 3004, Australia.
J Robot Surg. 2024 Mar 30;18(1):145. doi: 10.1007/s11701-024-01887-w.
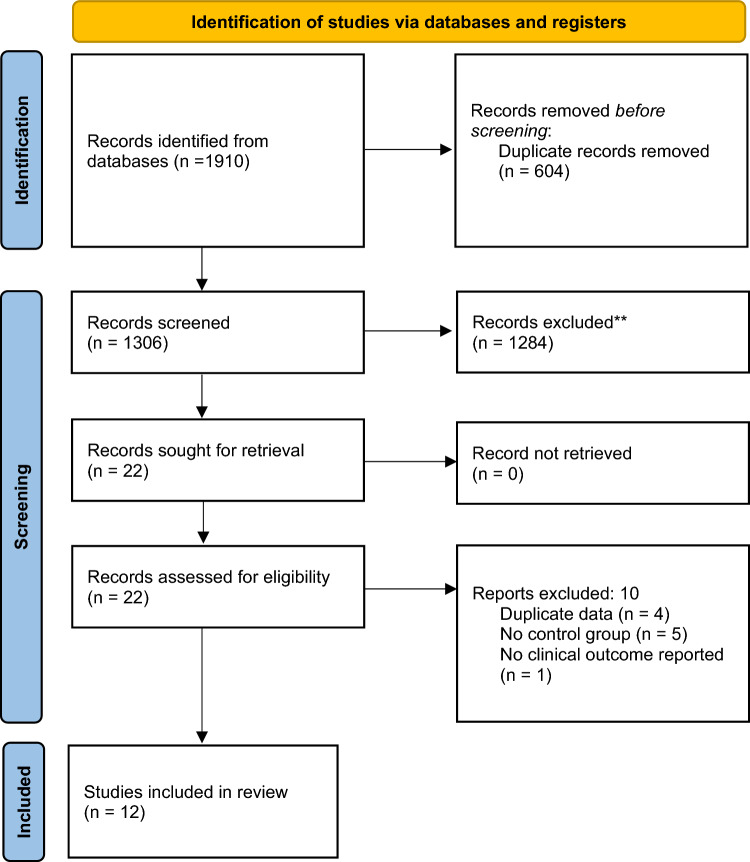
Multiple novel multi-port robotic surgical systems have been introduced into clinical practice. This systematic review aims to evaluate the clinical outcomes of these novel robotic systems to conventional laparoscopic technique and established da Vinci robotic surgical platforms. A literature search of Embase, Medline, Pubmed, Cochrane library, and Google Scholar was performed according to the PRISMA guidelines from 2012 to May 2023. Studies comparing clinical outcomes of novel multi-port robotic surgical systems with laparoscopic or the da Vinci platforms were included. Case series with no comparison groups were excluded. Descriptive statistics were used to report patient and outcome data. A systematic narrative review was provided for each outcome. Twelve studies comprised of 1142 patients were included. A total of 6 novel multi-port robotic systems: Micro Hand S, Senhance, Revo-i MSR-5000, KangDuo, Versius, and Hugo RAS were compared against the laparoscopic or the da Vinci robotic platforms. Clinical outcomes of these novel robotic platforms were comparable to the established da Vinci platforms. When compared against conventional laparoscopic approaches, the robotic platforms demonstrated lower volume of blood loss, shorter length of stay but longer operative time. This systematic review highlighted the safe implementation and efficacy of 6 new robotic systems. The clinical outcomes achieved by these new robotic systems are comparable to the established da Vinci robotic system in simple to moderate case complexities. There is emerging evidence that these new robotic systems provide a viable alternative to currently available robotic platforms.
多种新型多端口机器人手术系统已应用于临床实践。本系统评价旨在评估这些新型机器人系统与传统腹腔镜技术和已建立的达芬奇机器人手术平台的临床结果。根据 PRISMA 指南,我们对 2012 年至 2023 年 5 月期间的 Embase、Medline、Pubmed、Cochrane 图书馆和 Google Scholar 进行了文献检索。纳入比较新型多端口机器人手术系统与腹腔镜或达芬奇平台临床结果的研究。排除无对照组的病例系列。使用描述性统计报告患者和结局数据。对每个结局提供系统叙述性综述。纳入了 12 项研究,共 1142 例患者。共有 6 种新型多端口机器人系统:Micro Hand S、Senhance、Revo-i MSR-5000、KangDuo、Versius 和 Hugo RAS,与腹腔镜或达芬奇机器人平台进行了比较。这些新型机器人平台的临床结果与已建立的达芬奇平台相当。与传统腹腔镜方法相比,机器人平台显示出血量更少、住院时间更短,但手术时间更长。本系统评价强调了 6 种新型机器人系统的安全实施和有效性。这些新型机器人系统在简单至中度病例复杂性方面的临床结果与已建立的达芬奇机器人系统相当。有新的证据表明,这些新型机器人系统为现有机器人平台提供了一种可行的替代方案。