Zhou Shuai, Li Yuanhang, Wang Qianqian, Lyu Zhiyang
Jiangsu Key Laboratory for Design and Manufacture of Micro-Nano Biomedical Instruments, School of Mechanical Engineering, Southeast University, Nanjing 211189, China.
Cyborg Bionic Syst. 2024 Apr 18;5:0105. doi: 10.34133/cbsystems.0105. eCollection 2024.
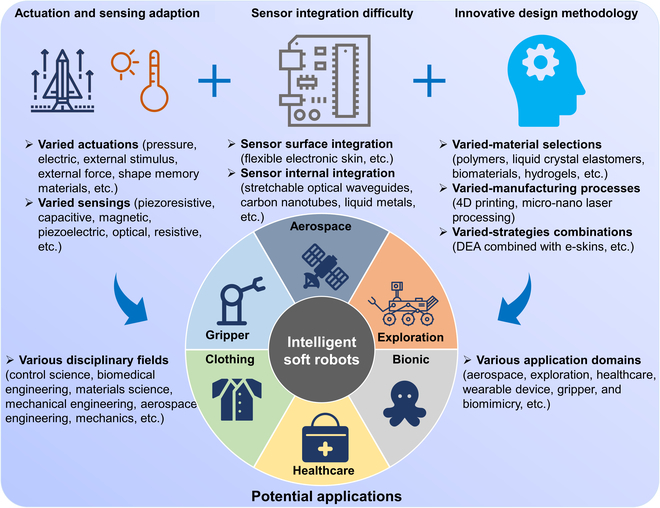
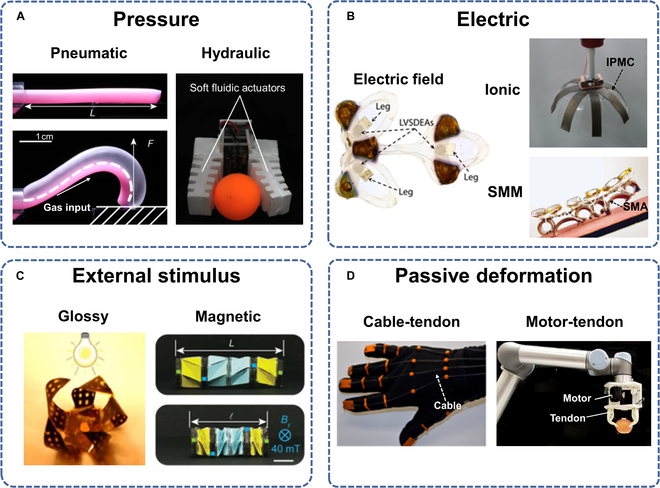
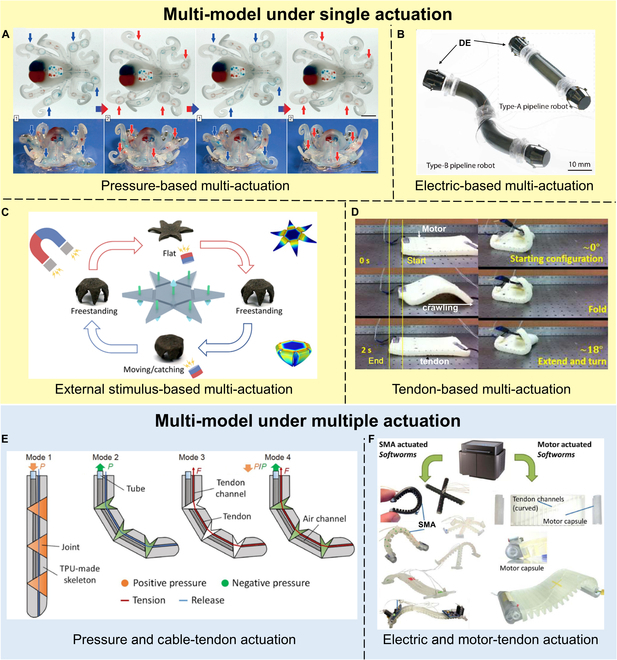
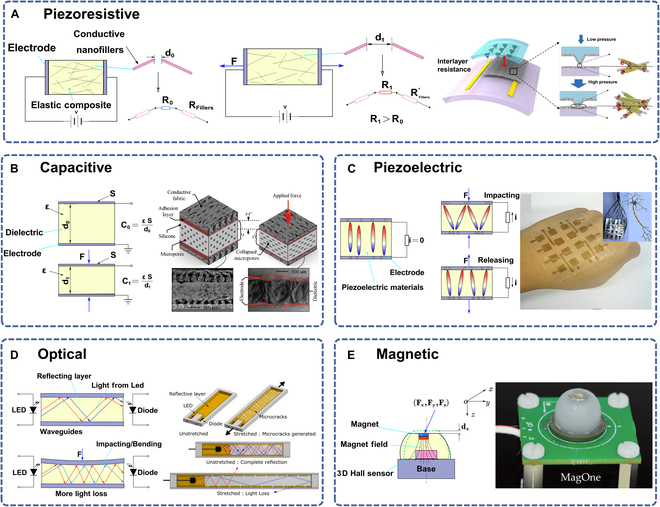
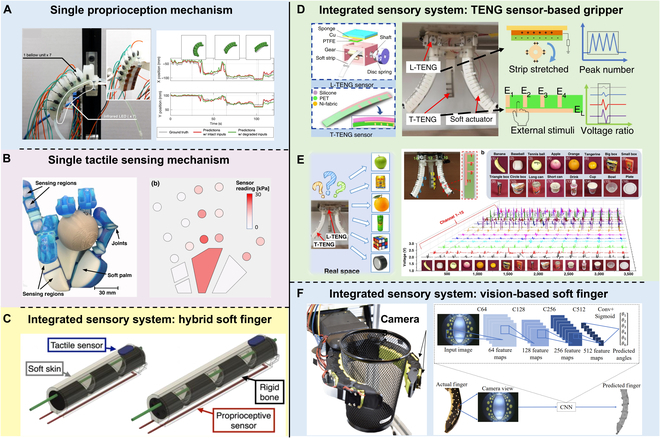
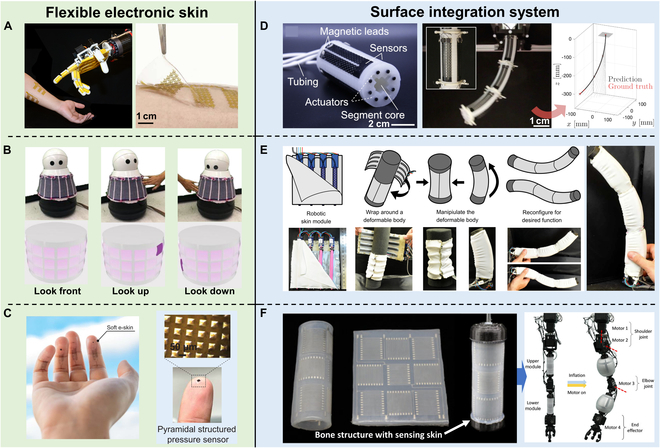
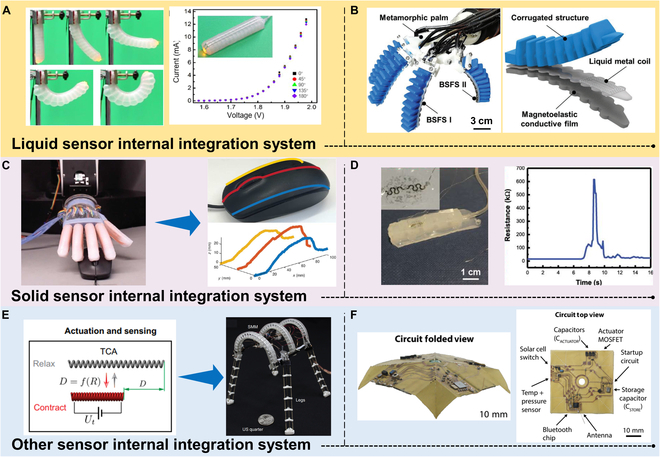
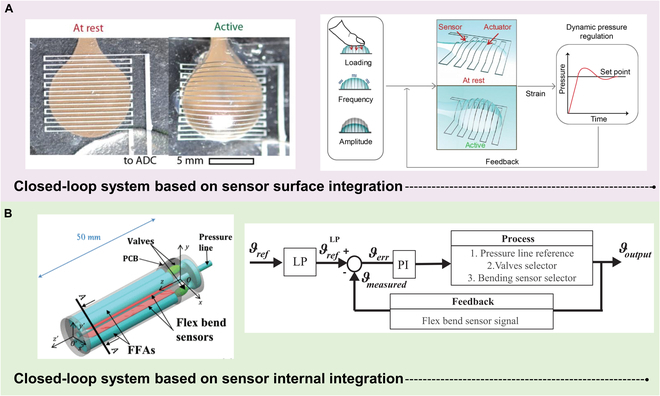
Soft robotics has received substantial attention due to its remarkable deformability, making it well-suited for a wide range of applications in complex environments, such as medicine, rescue operations, and exploration. Within this domain, the interaction of actuation and sensing is of utmost importance for controlling the movements and functions of soft robots. Nonetheless, current research predominantly focuses on isolated actuation and sensing capabilities, often neglecting the critical integration of these 2 domains to achieve intelligent functionality. In this review, we present a comprehensive survey of fundamental actuation strategies and multimodal actuation while also delving into advancements in proprioceptive and haptic sensing and their fusion. We emphasize the importance of integrating actuation and sensing in soft robotics, presenting 3 integration methodologies, namely, sensor surface integration, sensor internal integration, and closed-loop system integration based on sensor feedback. Furthermore, we highlight the challenges in the field and suggest compelling directions for future research. Through this comprehensive synthesis, we aim to stimulate further curiosity among researchers and contribute to the development of genuinely intelligent soft robots.
软机器人技术因其卓越的可变形性而受到广泛关注,使其非常适合在复杂环境中的各种应用,如医学、救援行动和探索。在这一领域中,驱动与传感的相互作用对于控制软机器人的运动和功能至关重要。然而,当前的研究主要集中在孤立的驱动和传感能力上,常常忽视这两个领域的关键整合以实现智能功能。在本综述中,我们对基本驱动策略和多模态驱动进行了全面的调查,同时深入探讨了本体感觉和触觉传感的进展及其融合。我们强调在软机器人技术中整合驱动和传感的重要性,提出了三种整合方法,即传感器表面整合、传感器内部整合以及基于传感器反馈的闭环系统整合。此外,我们突出了该领域的挑战,并为未来研究提出了引人注目的方向。通过这种全面的综合,我们旨在激发研究人员进一步的好奇心,并为真正智能的软机器人的发展做出贡献。