Institute for Health and Sport, Victoria University, Melbourne, Australia.
J Neuroeng Rehabil. 2024 Jun 21;21(1):105. doi: 10.1186/s12984-024-01394-x.
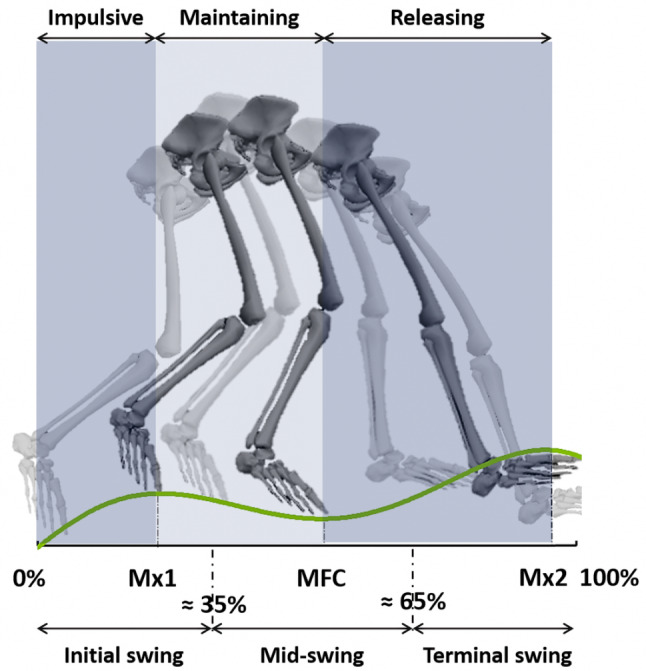
The ankle is usually highly effective in modulating the swing foot's trajectory to ensure safe ground clearance but there are few reports of ankle kinetics and mechanical energy exchange during the gait cycle swing phase. Previous work has investigated ankle swing mechanics during normal walking but with developments in devices providing dorsiflexion assistance, it is now essential to understand the minimal kinetic requirements for increasing ankle dorsiflexion, particularly for devices employing energy harvesting or utilizing lighter and lower power energy sources or actuators.
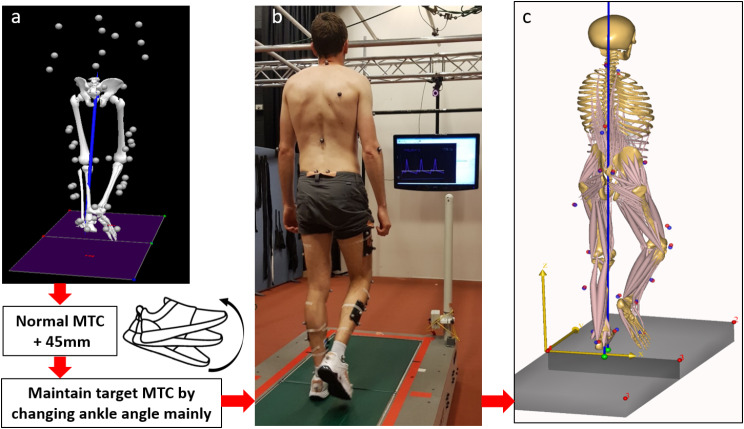
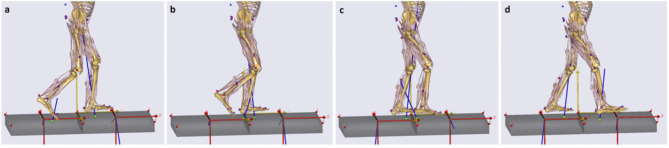
Using a real-time treadmill-walking biofeedback technique, swing phase ankle dorsiflexion was experimentally controlled to increase foot-ground clearance by 4 cm achieved via increased ankle dorsiflexion. Swing phase ankle moments and dorsiflexor muscle forces were estimated using AnyBody modeling system. It was hypothesized that increasing foot-ground clearance by 4 cm, employing only the ankle joint, would require significantly higher dorsiflexion moments and muscle forces than a normal walking control condition.
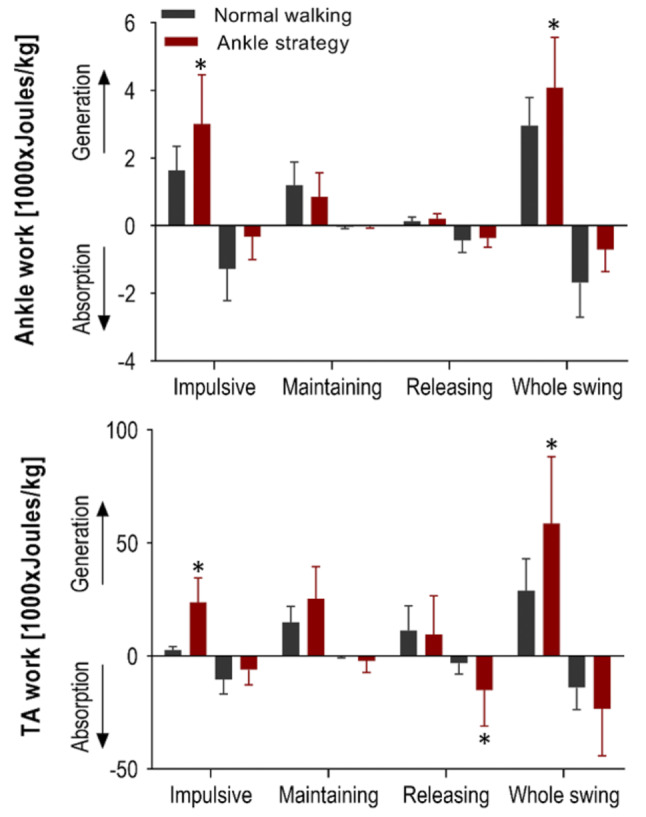
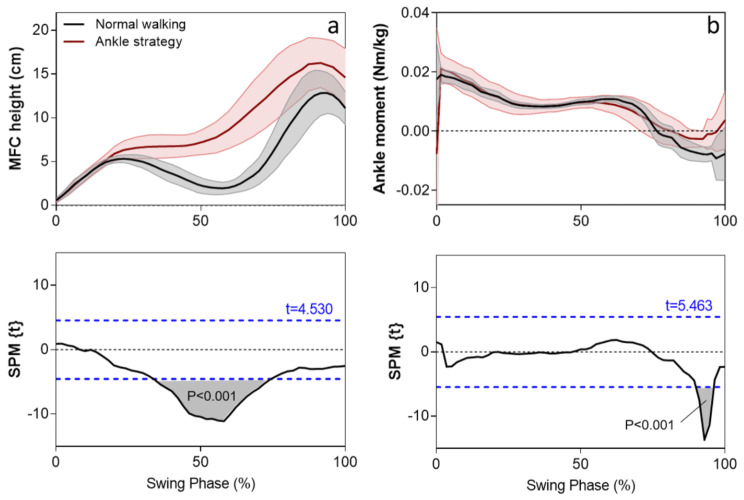
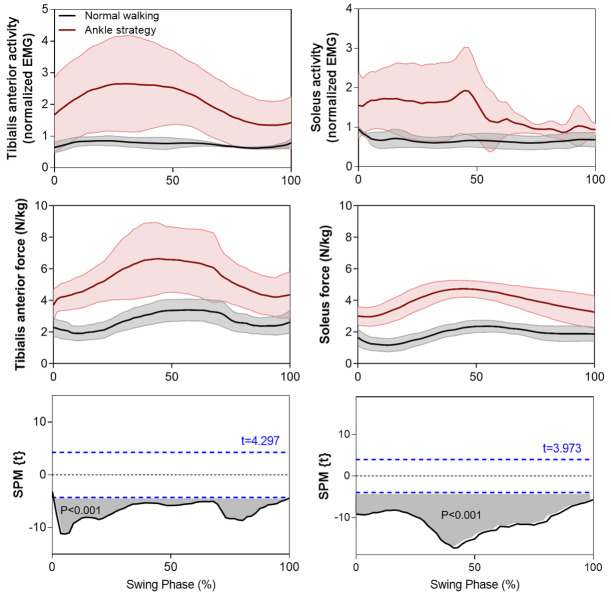
Results did not confirm significantly increased ankle moments with augmented dorsiflexion, with 0.02 N.m/kg at toe-off reducing to zero by the end of swing. Tibialis Anterior muscle force incremented significantly from 2 to 4 N/kg after toe-off, due to coactivation with the Soleus. To ensure an additional 4 cm mid swing foot-ground clearance, an estimated additional 0.003 Joules/kg is required to be released immediately after toe-off.
This study highlights the interplay between ankle moments, muscle forces, and energy demands during swing phase ankle dorsiflexion, offering insights for the design of ankle assistive technologies. External devices do not need to deliver significantly greater ankle moments to increase ankle dorsiflexion but, they should offer higher mechanical power to provide rapid bursts of energy to facilitate quick dorsiflexion transitions before reaching Minimum Foot Clearance event. Additionally, for ankle-related bio-inspired devices incorporating artificial muscles or humanoid robots that aim to replicate natural ankle biomechanics, the inclusion of supplementary Tibialis Anterior forces is crucial due to Tibialis Anterior and Soleus co-activation. These design strategies ensures that ankle assistive technologies are both effective and aligned with the biomechanical realities of human movement.
踝关节通常能有效地调节摆动脚的轨迹,以确保安全的离地间隙,但关于步态周期摆动阶段踝关节动力学和机械能交换的报道很少。以前的工作已经研究了正常行走时的踝关节摆动力学,但随着提供背屈辅助的设备的发展,现在有必要了解增加踝关节背屈的最小动力学要求,特别是对于使用能量收集或利用更轻、更低功率的能源或执行器的设备。
使用实时跑步机行走生物反馈技术,实验控制摆动阶段的踝关节背屈,通过增加踝关节背屈将足地间隙增加 4cm。使用 AnyBody 建模系统估计摆动阶段的踝关节力矩和背屈肌力。假设仅使用踝关节将足地间隙增加 4cm,将需要比正常行走控制条件显著更高的背屈力矩和肌肉力。
结果并未证实随着背屈的增加而显著增加踝关节力矩,在足趾离地时的 0.02N.m/kg 减少到摆动结束时的零。胫骨前肌的力从足趾离地时的 2N/kg 显著增加到 4N/kg,这是由于与比目鱼肌的共同激活。为了确保在摆动中期额外增加 4cm 的足地间隙,需要在足趾离地后立即释放估计额外的 0.003 焦耳/kg。
本研究强调了摆动阶段踝关节背屈时踝关节力矩、肌肉力和能量需求之间的相互作用,为踝关节辅助技术的设计提供了见解。外部设备不需要提供显著更大的踝关节力矩来增加踝关节背屈,但它们应该提供更高的机械功率,以在达到最小足间隙事件之前提供快速的背屈过渡。此外,对于包含人工肌肉或旨在复制自然踝关节生物力学的踝关节相关仿生设备,由于胫骨前肌和比目鱼肌的共同激活,包含补充的胫骨前肌力至关重要。这些设计策略确保了踝关节辅助技术既有效,又符合人类运动的生物力学现实。