Nencki Institute of Experimental Biology, Polish Academy of Sciences, Warszawa, Poland.
Sci Rep. 2024 Sep 11;14(1):21252. doi: 10.1038/s41598-024-72272-8.
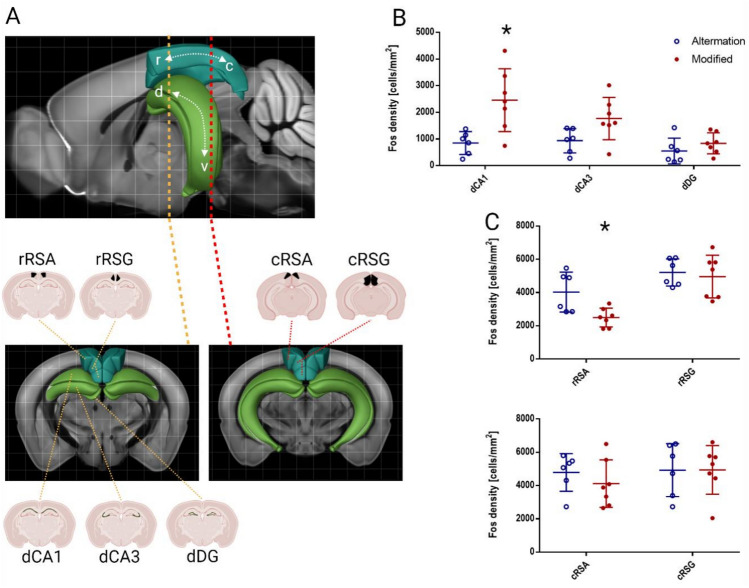
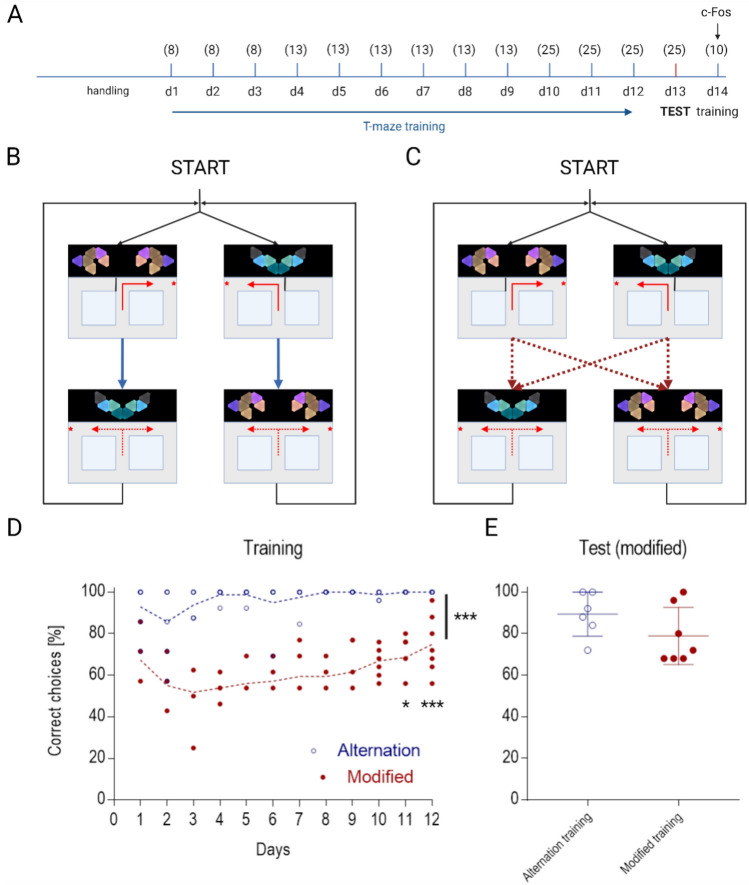
Here, we show that during continuous navigation in a dynamic external environment, mice are capable of developing a foraging strategy based exclusively on changing distal (allothetic) information and that this process may involve two alternative components of the spatial memory circuit: the hippocampus and retrosplenial cortex. To this end, we designed a novel custom apparatus and implemented a behavioral protocol based on the figure-8-maze paradigm with two goal locations associated with distinct contexts. We assessed whether mice are able to learn to retrieve a sequence of rewards guided exclusively by the changing context. We found out that training mice in the apparatus leads to change in strategy from the internal tendency to alternate into navigation based exclusively on visual information. This effect could be achieved using two different training protocols: prolonged alternation training, or a flexible protocol with unpredictable turn succession. Based on the c-FOS mapping we also provide evidence of opposing levels of engagement of hippocampus and retrosplenial cortex after training of mice in these two different regimens. This supports the hypothesis of the existence of parallel circuits guiding spatial navigation, one based on the well-described hippocampal representation, and another, RSC-dependent.
在这里,我们表明,在动态外部环境中持续导航时,老鼠能够基于不断变化的远距离(异质)信息发展出一种觅食策略,而这个过程可能涉及空间记忆回路的两个替代组成部分:海马体和后扣带皮层。为此,我们设计了一种新颖的定制设备,并实施了一种基于带有两个与不同环境相关的目标位置的 8 字形迷宫范式的行为协议。我们评估了老鼠是否能够学习仅通过不断变化的环境来获取一系列奖励。我们发现,在设备中训练老鼠会导致策略从内部交替倾向转变为仅基于视觉信息的导航。可以使用两种不同的训练方案来实现此效果:延长交替训练,或具有不可预测转弯顺序的灵活方案。基于 c-FOS 映射,我们还提供了在这两种不同方案中对老鼠进行训练后,海马体和后扣带皮层参与程度相反的证据。这支持了存在平行电路引导空间导航的假设,一种基于描述良好的海马体表示,另一种则依赖于 RSC。