Center for Mathematical Science and Advanced Technology, Japan Agency for Marine-Earth Science and Technology, Yokohama, 236-0001, Japan.
Cybozu, Inc., 2-7-1 Nihombashi, Chuo-ku, Tokyo, 103-6027, Japan.
Commun Biol. 2024 Sep 20;7(1):1152. doi: 10.1038/s42003-024-06843-w.
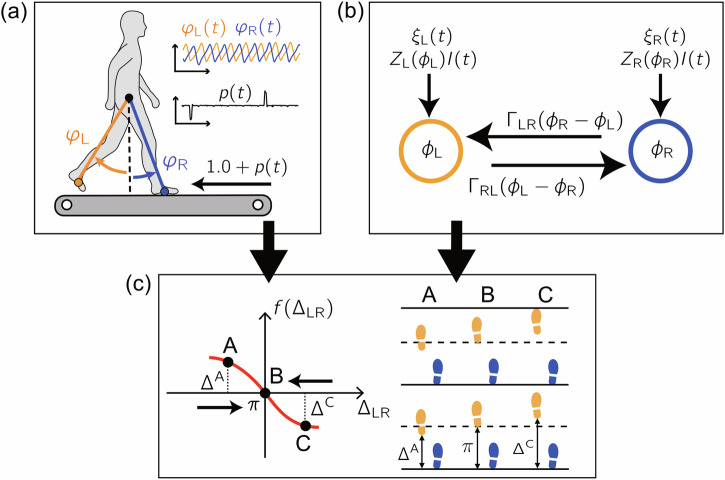
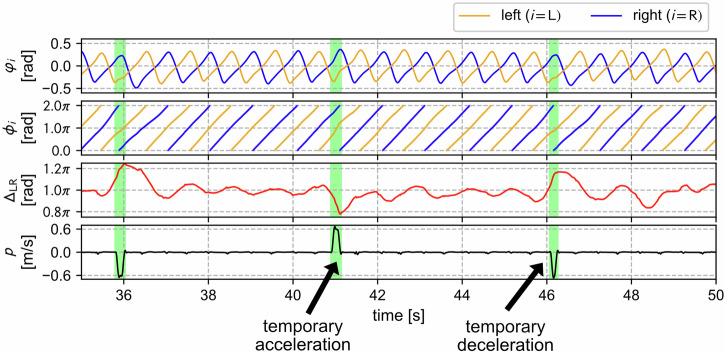
In human walking, the left and right legs move alternately, half a stride out of phase with each other. Although various parameters, such as stride frequency and length, vary with walking speed, the antiphase relationship remains unchanged. In contrast, during walking in left-right asymmetric situations, the relative phase shifts from the antiphase condition to compensate for the asymmetry. Interlimb coordination is important for adaptive walking and we expect that interlimb coordination is strictly controlled during walking. However, the control mechanism remains unclear. In the present study, we derived a quantity that models the control of interlimb coordination during walking using two coupled oscillators based on the phase reduction theory and Bayesian inference method. The results were not what we expected. Specifically, we found that the relative phase is not actively controlled until the deviation from the antiphase condition exceeds a certain threshold. In other words, the control of interlimb coordination has a dead zone like that in the case of the steering wheel of an automobile. It is conjectured that such forgoing of control enhances energy efficiency and maneuverability. Our discovery of the dead zone in the control of interlimb coordination provides useful insight for understanding gait control in humans.
在人类行走中,左腿和右腿交替移动,彼此相差半个步幅。尽管步频和步长等各种参数随行走速度而变化,但反相对相位关系保持不变。相比之下,在左右不对称的情况下行走时,相对相位会从反相对相位转变,以补偿不对称性。肢体间协调对于适应性行走很重要,我们期望在行走过程中严格控制肢体间的协调。然而,控制机制仍不清楚。在本研究中,我们使用基于相减理论和贝叶斯推断方法的两个耦合振荡器,推导出了一个模型来描述行走过程中肢体间协调的控制。结果出乎意料。具体来说,我们发现,只有当相对相位偏离反相对相位超过一定阈值时,相对相位才会受到主动控制。换句话说,肢体间协调的控制具有类似汽车方向盘的死区。据推测,这种放弃控制可以提高能量效率和机动性。我们发现肢体间协调控制中的死区,为理解人类的步态控制提供了有用的见解。