Molkov Yaroslav I, Bacak Bartholomew J, Talpalar Adolfo E, Rybak Ilya A
Department of Mathematical Sciences, Indiana University-Purdue University, Indianapolis, Indiana, United States of America.
Department of Neurobiology and Anatomy, Drexel University College of Medicine, Philadelphia, Pennsylvania, United States of America.
PLoS Comput Biol. 2015 May 13;11(5):e1004270. doi: 10.1371/journal.pcbi.1004270. eCollection 2015 May.
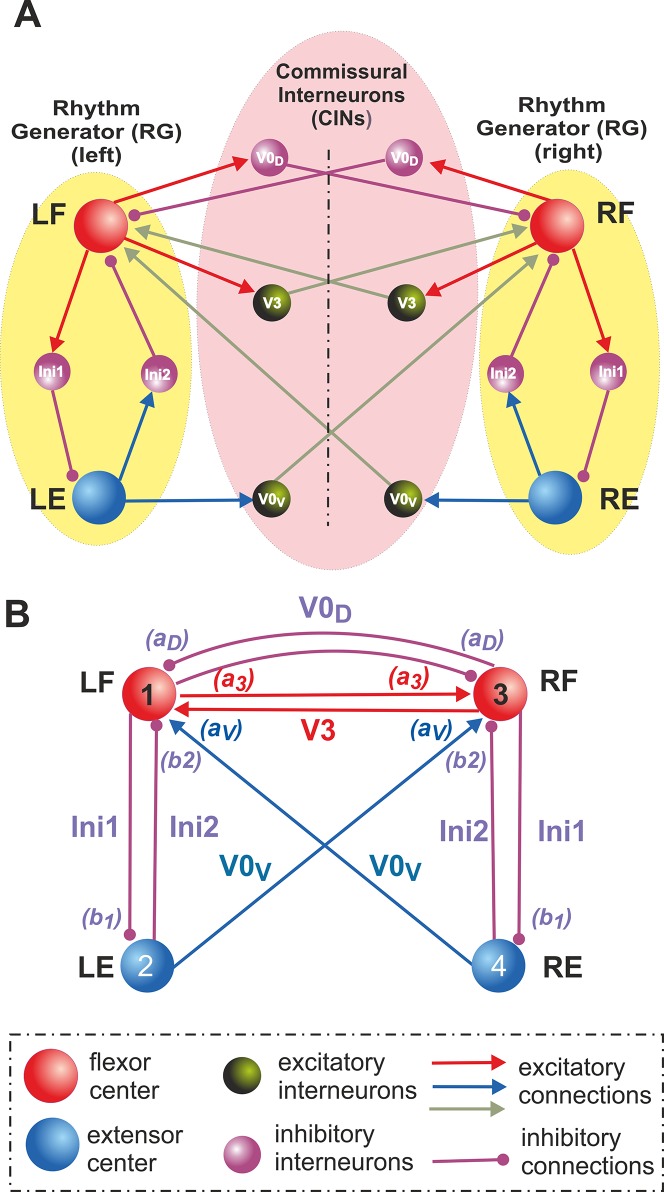
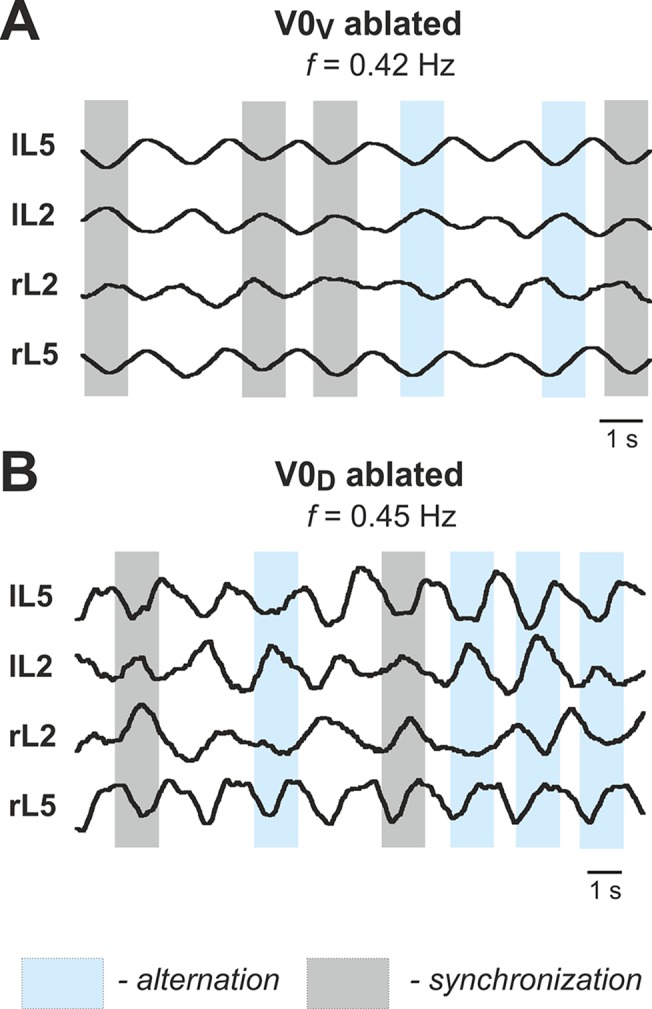
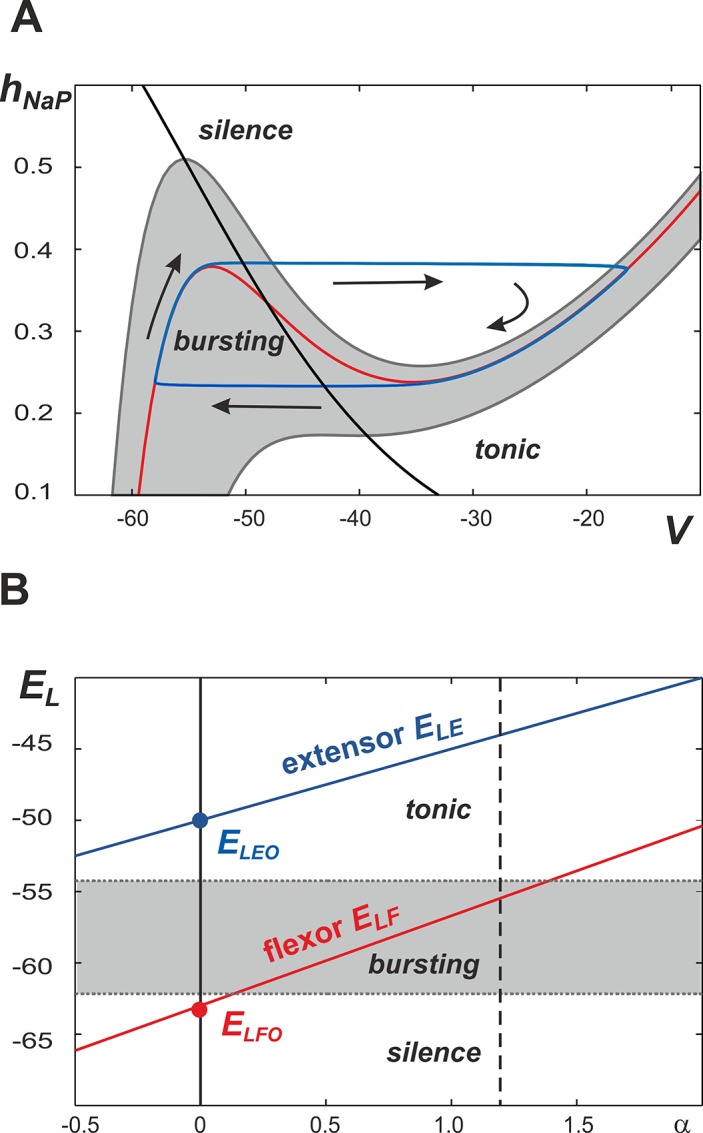
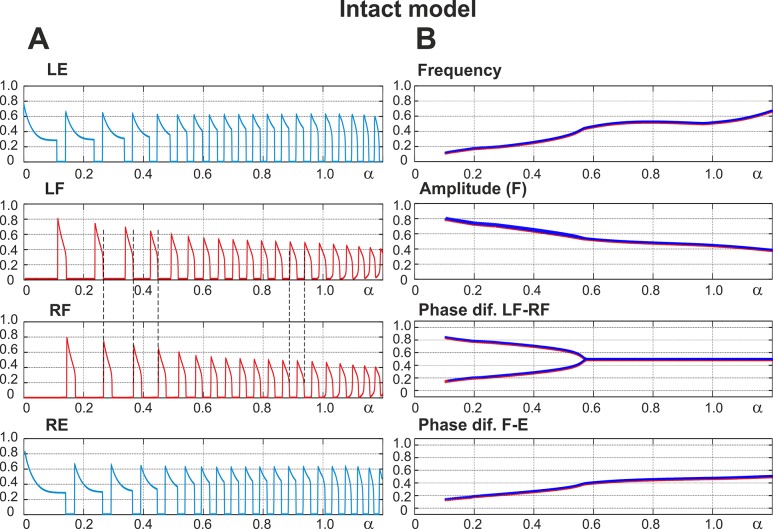
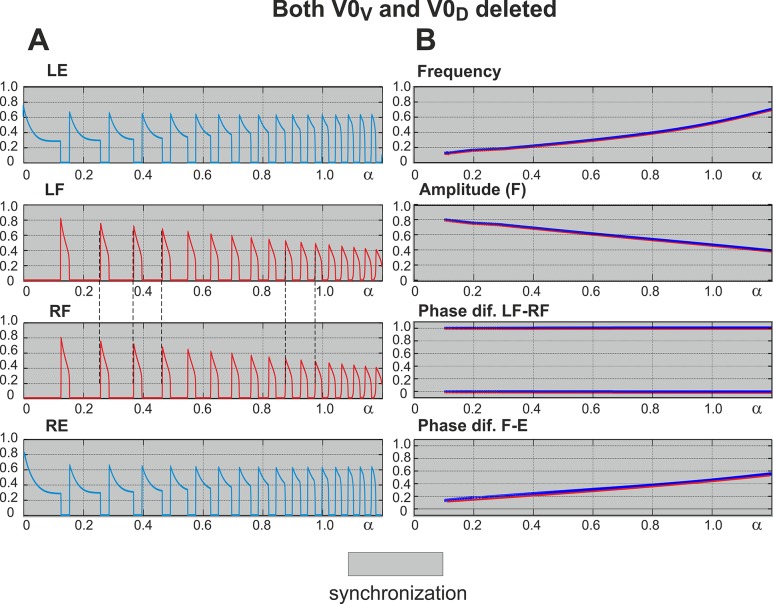
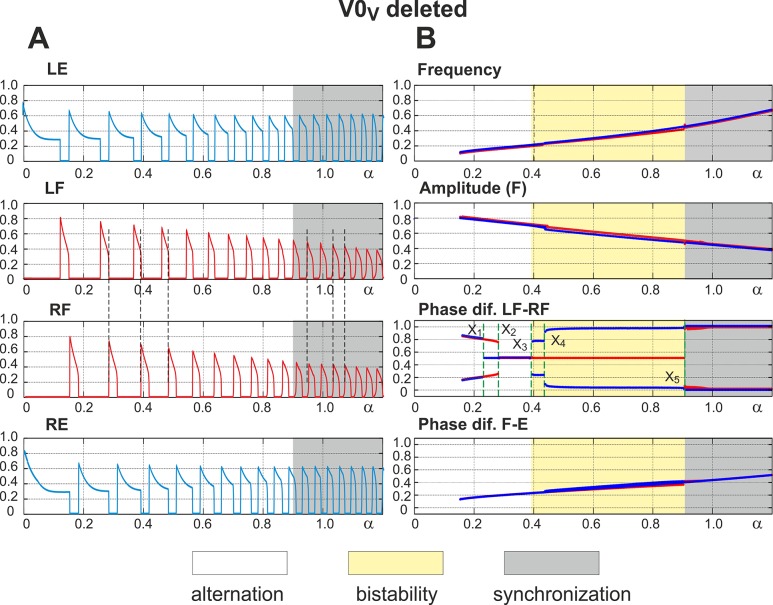
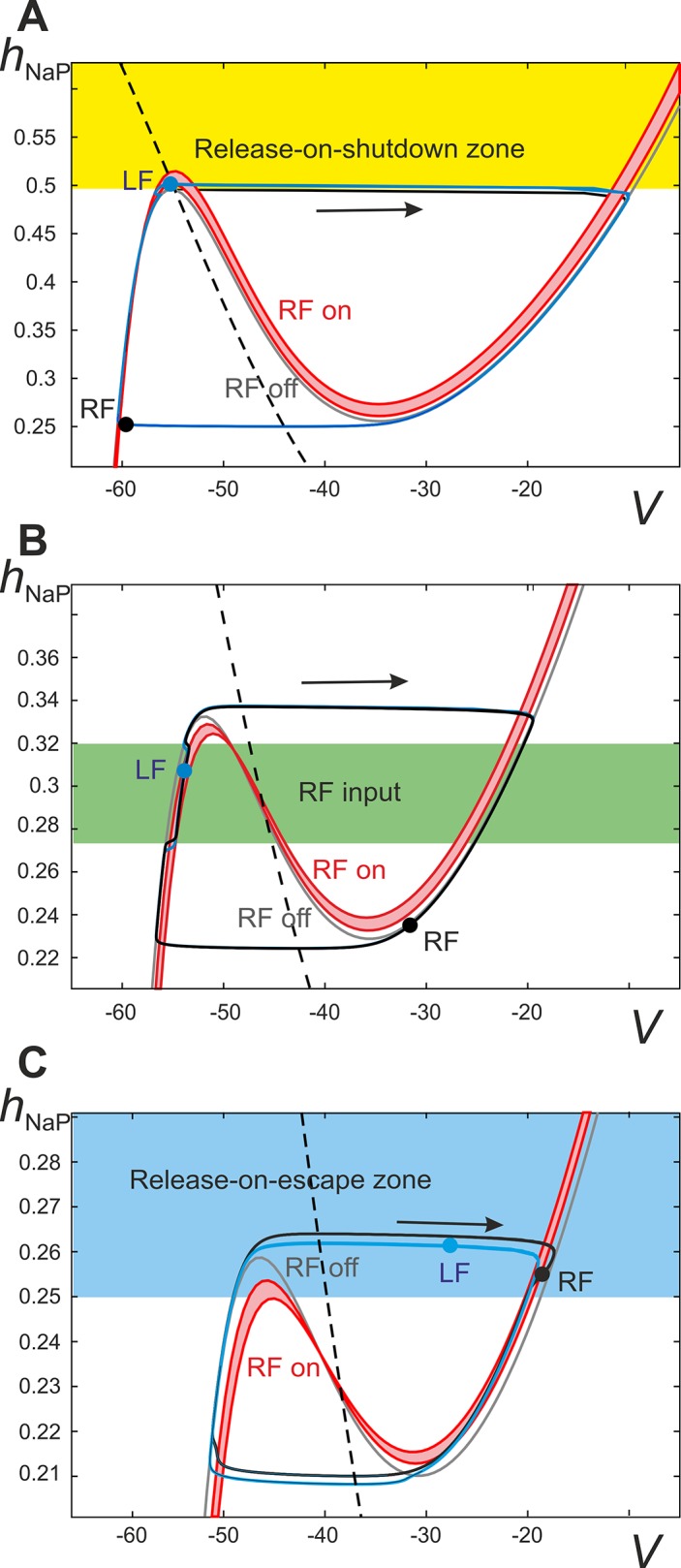
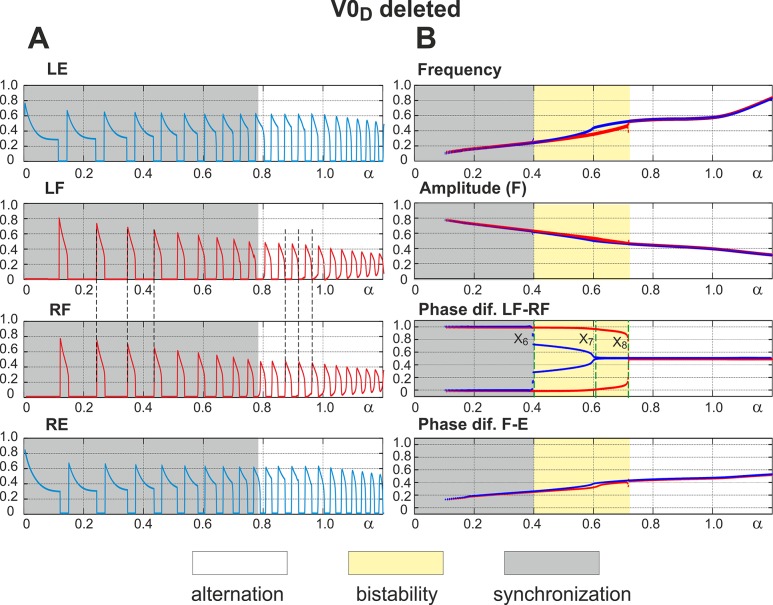
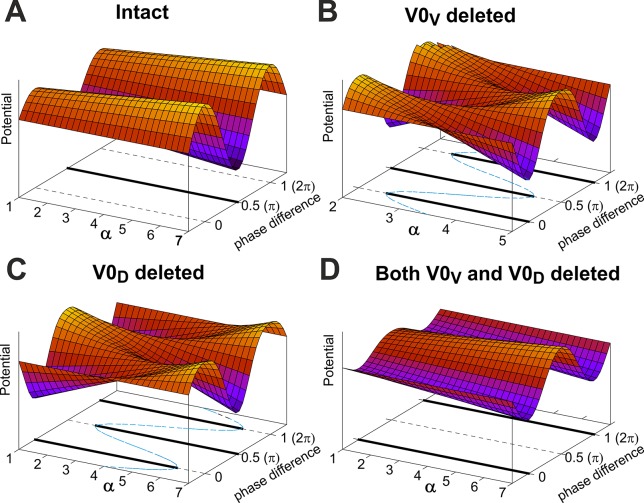
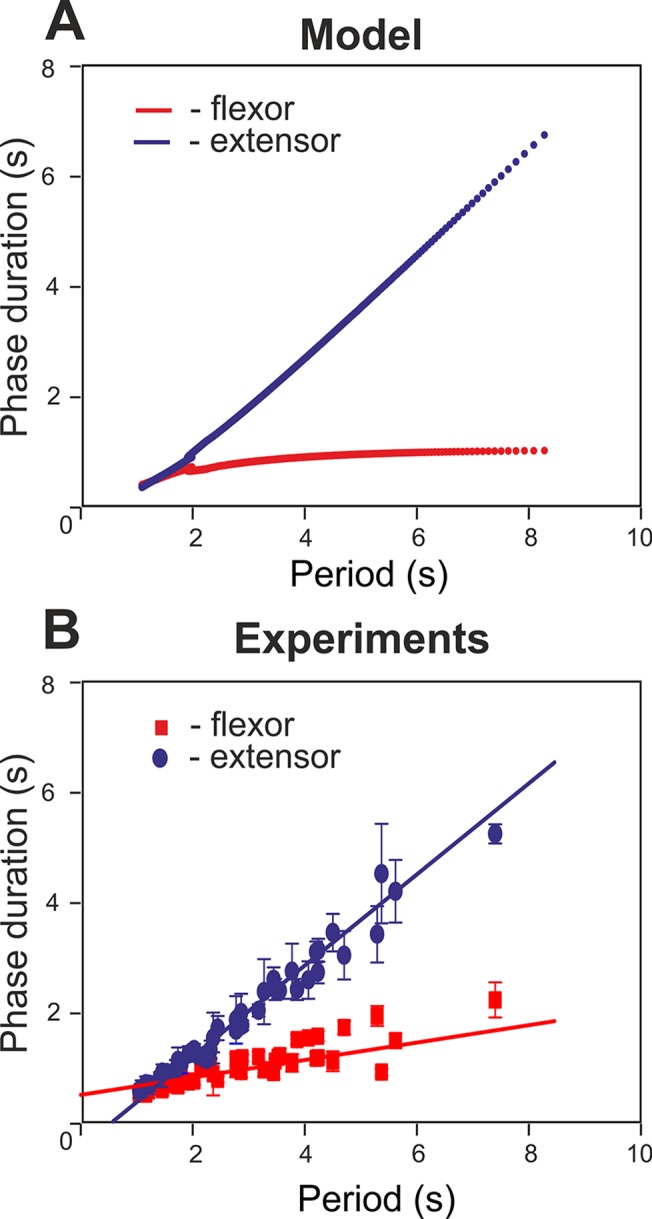
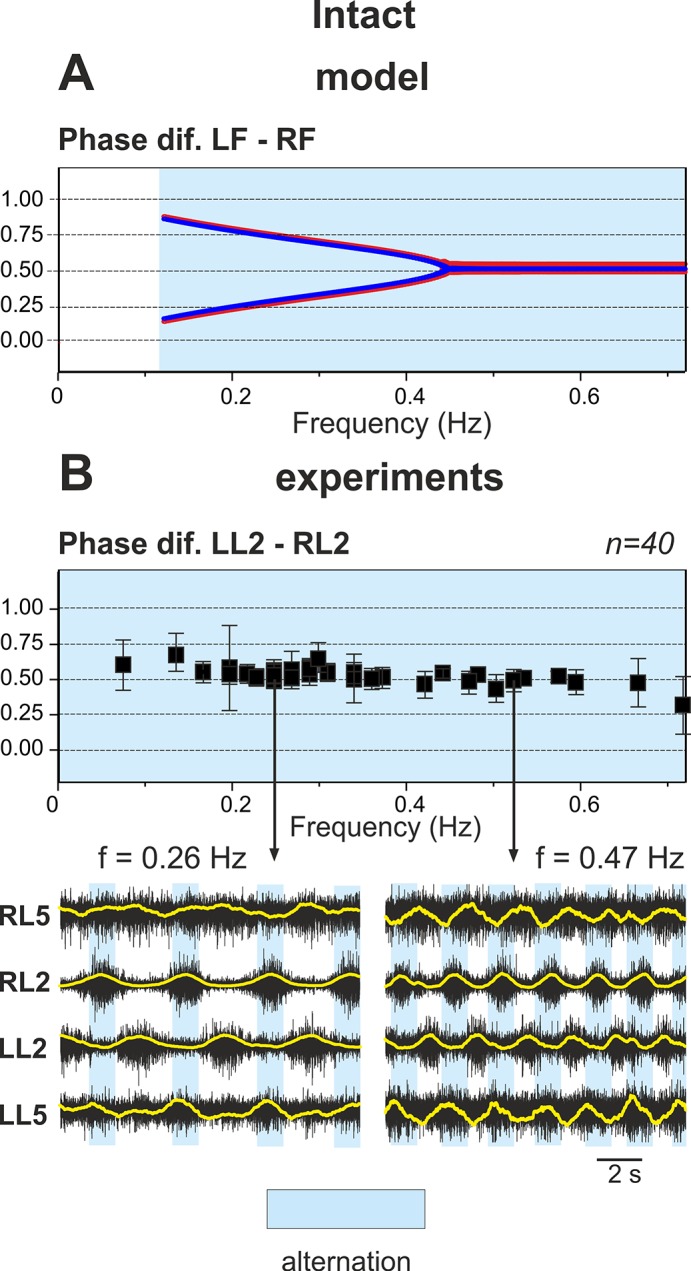
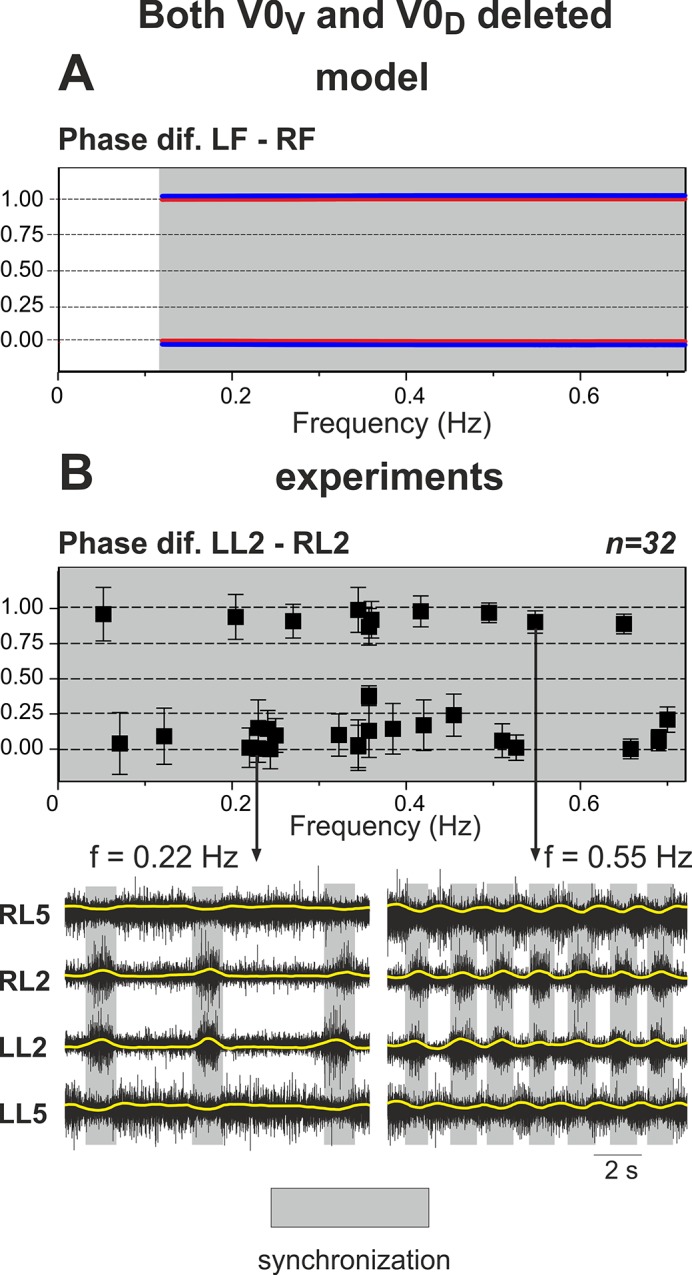
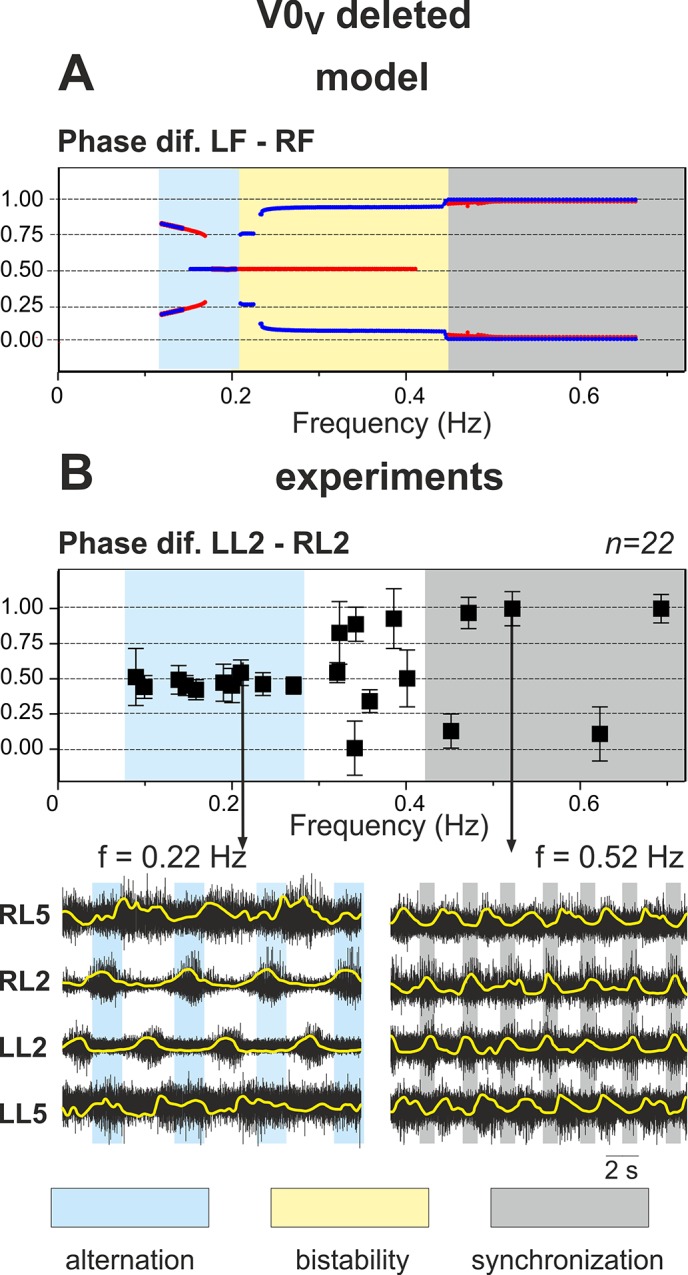
The locomotor gait in limbed animals is defined by the left-right leg coordination and locomotor speed. Coordination between left and right neural activities in the spinal cord controlling left and right legs is provided by commissural interneurons (CINs). Several CIN types have been genetically identified, including the excitatory V3 and excitatory and inhibitory V0 types. Recent studies demonstrated that genetic elimination of all V0 CINs caused switching from a normal left-right alternating activity to a left-right synchronized "hopping" pattern. Furthermore, ablation of only the inhibitory V0 CINs (V0D subtype) resulted in a lack of left-right alternation at low locomotor frequencies and retaining this alternation at high frequencies, whereas selective ablation of the excitatory V0 neurons (V0V subtype) maintained the left-right alternation at low frequencies and switched to a hopping pattern at high frequencies. To analyze these findings, we developed a simplified mathematical model of neural circuits consisting of four pacemaker neurons representing left and right, flexor and extensor rhythm-generating centers interacting via commissural pathways representing V3, V0D, and V0V CINs. The locomotor frequency was controlled by a parameter defining the excitation of neurons and commissural pathways mimicking the effects of N-methyl-D-aspartate on locomotor frequency in isolated rodent spinal cord preparations. The model demonstrated a typical left-right alternating pattern under control conditions, switching to a hopping activity at any frequency after removing both V0 connections, a synchronized pattern at low frequencies with alternation at high frequencies after removing only V0D connections, and an alternating pattern at low frequencies with hopping at high frequencies after removing only V0V connections. We used bifurcation theory and fast-slow decomposition methods to analyze network behavior in the above regimes and transitions between them. The model reproduced, and suggested explanation for, a series of experimental phenomena and generated predictions available for experimental testing.
有肢动物的运动步态由左右腿协调和运动速度定义。脊髓中控制左右腿的左右神经活动之间的协调由连合中间神经元(CINs)提供。已经通过遗传学鉴定出几种CIN类型,包括兴奋性V3型以及兴奋性和抑制性V0型。最近的研究表明,所有V0 CINs的基因消除导致从正常的左右交替活动转变为左右同步的“跳跃”模式。此外,仅切除抑制性V0 CINs(V0D亚型)会导致在低运动频率下缺乏左右交替,并在高频率下保持这种交替,而选择性切除兴奋性V0神经元(V0V亚型)则在低频率下保持左右交替,并在高频率下转变为跳跃模式。为了分析这些发现,我们开发了一个简化的神经回路数学模型,该模型由四个起搏器神经元组成,分别代表左右、屈肌和伸肌节律产生中心,它们通过代表V3、V0D和V0V CINs的连合通路相互作用。运动频率由一个参数控制,该参数定义了神经元和连合通路的兴奋,模拟了N-甲基-D-天冬氨酸对离体啮齿动物脊髓制剂中运动频率的影响。该模型在对照条件下表现出典型的左右交替模式,在去除两个V0连接后在任何频率下都转变为跳跃活动,在仅去除V0D连接后在低频率下为同步模式,在高频率下为交替模式,在仅去除V0V连接后在低频率下为交替模式,在高频率下为跳跃模式。我们使用分岔理论和快慢分解方法来分析上述状态及其之间的转变中的网络行为。该模型重现了一系列实验现象并提出了解释,并产生了可供实验测试的预测。