Dauzere-Peres Océane, Wystrach Antoine
Centre de Recherches sur la Cognition Animale, CBI,CNRS, Université Paul Sabatier, Toulouse, France.
Nat Commun. 2024 Dec 1;15(1):10205. doi: 10.1038/s41467-024-53856-4.
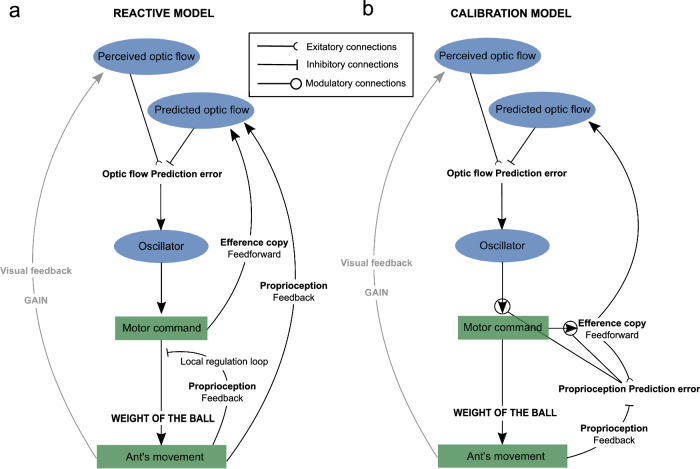
Forward models are mechanisms enabling an agent to predict the sensory outcomes of its actions. They can be implemented through efference copies: copies of motor signals inhibiting the expected sensory stimulation, literally canceling the perceptual outcome of the predicted action. In insects, efference copies are known to modulate optic flow detection for flight control in flies. Here we investigate whether forward models account for the detection of optic flow in walking ants, and how the latter is integrated for locomotion control. We mounted Cataglyphis velox ants in a virtual reality setup and manipulated the relationship between the ants' movements and the optic flow perceived. Our results show that ants compute predictions of the optic flow expected according to their own movements. However, the prediction is not solely based on efference copies, but involves proprioceptive feedbacks and is fine-tuned by the panorama's visual structure. Mismatches between prediction and perception are computed for each eye, and error signals are integrated to adjust locomotion through the modulation of internal oscillators. Our work reveals that insects' forward models are non-trivial and compute predictions based on multimodal information.
前向模型是一种使智能体能够预测其行动的感官结果的机制。它们可以通过传出副本实现:运动信号的副本抑制预期的感官刺激,实际上消除了预测行动的感知结果。在昆虫中,传出副本已知会调节果蝇飞行控制中的光流检测。在这里,我们研究前向模型是否能解释行走蚂蚁的光流检测,以及后者如何被整合用于运动控制。我们将迅猛箭蚁安装在虚拟现实装置中,并操纵蚂蚁的运动与所感知到的光流之间的关系。我们的结果表明,蚂蚁会根据自身运动计算预期光流的预测。然而,该预测并非仅基于传出副本,而是涉及本体感受反馈,并由全景视觉结构进行微调。针对每只眼睛计算预测与感知之间的不匹配,并且错误信号通过内部振荡器的调制被整合以调整运动。我们的工作表明,昆虫的前向模型并非简单,而是基于多模态信息进行预测计算。