Qiao Hua, Xia Runzhi, Chang Yongyun, Kong Keyu, Jin Minghao, Zhai Zanjing, Zhang Jingwei, Li Huiwu
Shanghai Key Laboratory of Orthopedics Implants, Shanghai Ninth People's Hospital, Department of Orthopedics Surgery, Shanghai Jiaotong University School of Medicine, Shanghai, 200011, PR China.
Heliyon. 2024 Nov 12;10(22):e40355. doi: 10.1016/j.heliyon.2024.e40355. eCollection 2024 Nov 30.
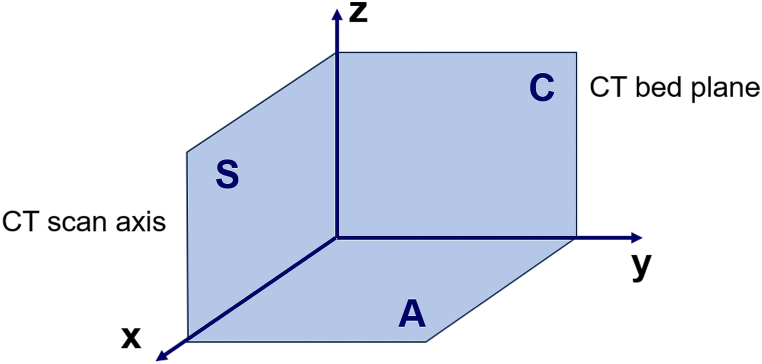
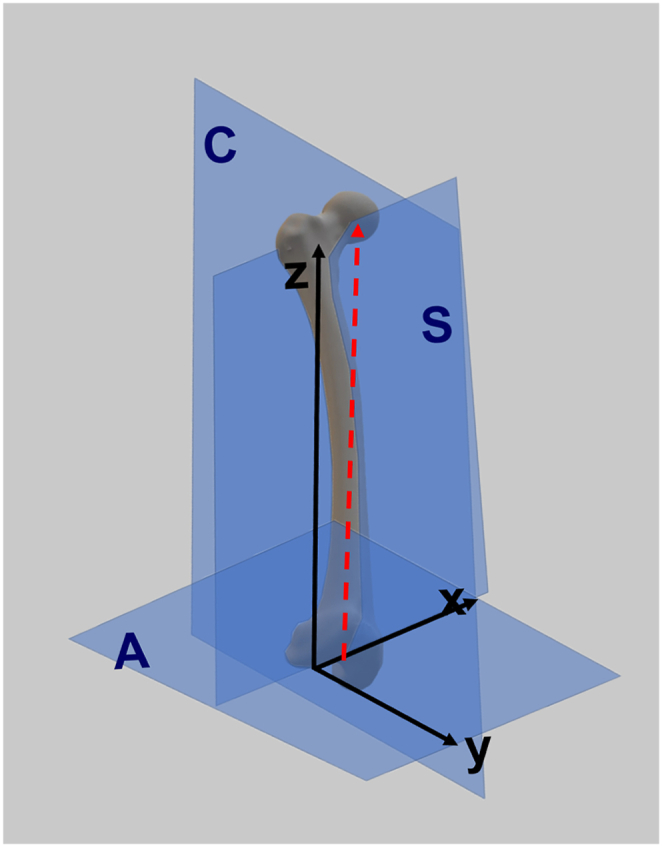
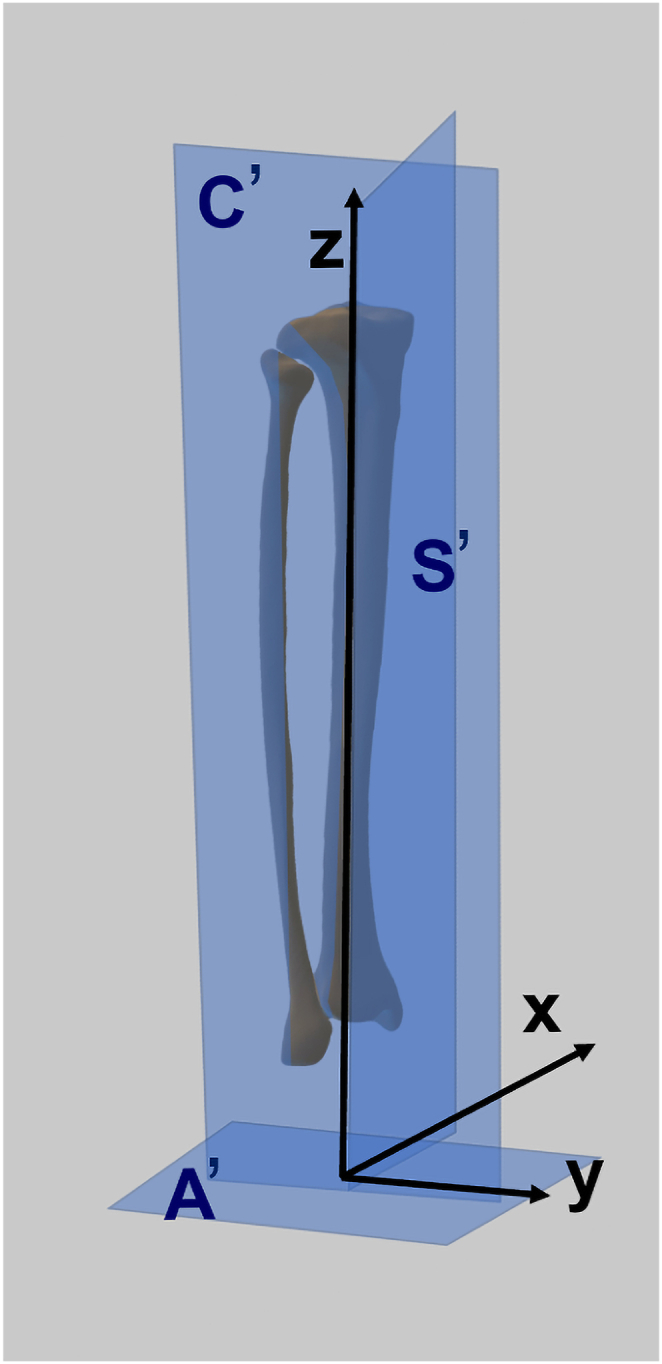
Preoperative planning is critical for total knee arthroplasty (TKA) performed with surgical robots, as it involves establishing a coordinate system to calculate the angle values of the components. This coordinate system serves as a reference during the surgical planning stage. This study aimed to develop a newly custom coordinate system suitable for integration with a surgical robot system.
The "Skywalker" surgical robot system was used to import computed tomography (CT) images of the entire lower extremities from 50 patients diagnosed with osteoarthritis. Three-dimensional reconstruction was subsequently performed. The TKA component was positioned at a fixed angle using the newly developed custom coordinate system. The angle values of the components, based on the standard CT coordinate system, were then recorded without altering their positioning. These values were analyzed to assess the differences between the two coordinate systems.
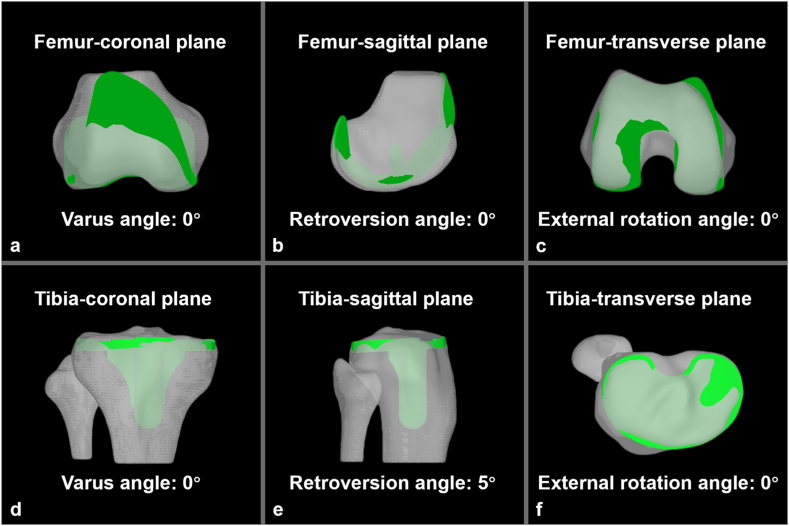
The mean and standard deviation values for the coronal, sagittal, and transverse plane positioning of the femoral component (absolute value of error) were 0.004° ± 0.020°, 0.006° ± 0.024°, and 0.158° ± 0.186°, respectively. Similarly, the mean and standard deviation values for the coronal, sagittal, and transverse plane positioning of the tibial component (absolute value of error) were 0.544° ± 0.452°, 0.042° ± 0.076°, and 0.348° ± 0.445°, respectively.
This newly developed custom coordinate system can be employed for preoperative planning in surgical robot system-assisted TKA, particularly for patients with significant positional abnormalities in their CT scans.
对于使用手术机器人进行的全膝关节置换术(TKA)而言,术前规划至关重要,因为它涉及建立一个坐标系来计算组件的角度值。该坐标系在手术规划阶段用作参考。本研究旨在开发一种适合与手术机器人系统集成的新型定制坐标系。
使用“天行者”手术机器人系统导入50例诊断为骨关节炎患者的全下肢计算机断层扫描(CT)图像。随后进行三维重建。使用新开发的定制坐标系将TKA组件定位在固定角度。然后在不改变其定位的情况下记录基于标准CT坐标系的组件角度值。对这些值进行分析以评估两个坐标系之间的差异。
股骨组件在冠状面、矢状面和横断面定位的均值和标准差(误差绝对值)分别为0.004°±0.020°、0.006°±0.024°和0.158°±0.186°。同样,胫骨组件在冠状面、矢状面和横断面定位的均值和标准差(误差绝对值)分别为0.544°±0.452°、0.042°±0.076°和0.348°±0.445°。
这种新开发的定制坐标系可用于手术机器人系统辅助TKA的术前规划,特别是对于CT扫描中存在明显位置异常的患者。