Xing Pengfei, Qu Junsong, Feng Shuaijing, Guo Jiarong, Huang Tao
Department of Orthopedics, The First Affiliated Hospital, China Medical University, Shenyang, 110000, China.
J Orthop Surg Res. 2024 Dec 24;19(1):872. doi: 10.1186/s13018-024-05372-w.
To evaluate the clinical efficacy and imaging outcomes of a domestically produced orthopedic surgical robot for total knee arthroplasty and to explore its applicability in patients with varying degrees of deformity.
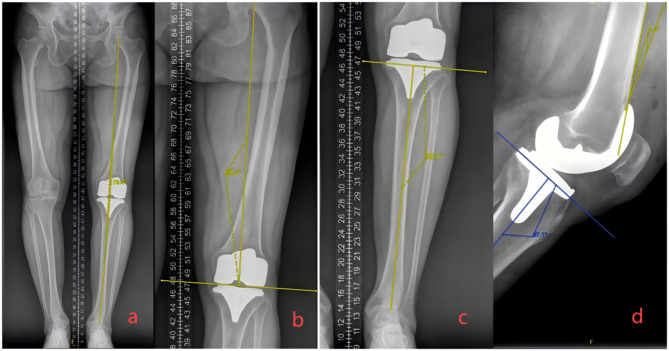
This study retrospectively included 120 patients who underwent TKA at our hospital between February 2023 and June 2024. The patients were divided into a control group (conventional TKA surgery) and an observation group (robot-assisted TKA surgery), with 60 patients in each group. Based on different lower extremity alignment angles, each group was further subdivided into mild deformities (Hip knee ankle angle (HKA angle)deviation < 10°) and significant deformities (HKA angle deviation ≥ 10°). Preoperative and postoperative HKA angles, range of motion (ROM), visual analog scale (VAS) pain scores, and Knee Society (AKS) scores were recorded for both groups. Postoperative measurements included the posterior tibial slope angle (PSA), femoral coronal component angle (FFC), tibial coronal component angle (FTC), and femoral sagittal component angle (LFC), as well as the incidence of abnormal values for each angle, which were analyzed statistically.
The operation time in the observation group was longer than that in the control group, but intraoperative blood loss was significantly lower in the observation group (P < 0.05). Postoperatively, the differences in the HKA and PSA angles and the incidence of abnormal values were significantly better in the robot-assisted group than in the control group (P < 0.05). The other indicators did not significantly differ between the two groups. (P > 0.05). For patients with mild preoperative deformities, those in the robot-assisted group had significantly better postoperative HKA angle deviations and rates of postoperative HKA angle outliers than those in the conventional group. For patients with significant deformities, the robot-assisted group presented greater postoperative HKA and PSA angle deviations than the control group; the postoperative HKA and PSA angle outlier rates were significantly lower in the robot-assisted group (P < 0.05).
The TINAVI robotic system demonstrated superior safety and efficacy in TKA surgery. Compared with conventional TKA, the robot-assisted system achieved significantly better outcomes regarding prosthesis implantation accuracy and lower extremity alignment, with a particular advantage in patients with severe limb alignment deformities.
评估国产骨科手术机器人用于全膝关节置换术的临床疗效和影像学结果,并探讨其在不同程度畸形患者中的适用性。
本研究回顾性纳入了2023年2月至2024年6月在我院接受全膝关节置换术的120例患者。将患者分为对照组(传统全膝关节置换术)和观察组(机器人辅助全膝关节置换术),每组60例。根据不同的下肢对线角度,每组进一步细分为轻度畸形(髋膝踝角(HKA角)偏差<10°)和重度畸形(HKA角偏差≥10°)。记录两组患者术前和术后的HKA角、活动范围(ROM)、视觉模拟评分(VAS)疼痛评分和膝关节协会(AKS)评分。术后测量包括胫骨后倾角度(PSA)、股骨冠状面组件角度(FFC)、胫骨冠状面组件角度(FTC)和股骨矢状面组件角度(LFC),以及每个角度异常值的发生率,并进行统计学分析。
观察组的手术时间比对照组长,但观察组的术中失血量明显低于对照组(P<0.05)。术后,机器人辅助组的HKA和PSA角度以及异常值发生率的差异明显优于对照组(P<0.05)。两组的其他指标无显著差异(P>0.05)。对于术前轻度畸形的患者,机器人辅助组的术后HKA角偏差和术后HKA角异常值发生率明显优于传统组。对于重度畸形的患者,机器人辅助组的术后HKA和PSA角度偏差大于对照组;机器人辅助组的术后HKA和PSA角异常值发生率明显较低(P<0.05)。
TINAVI机器人系统在全膝关节置换术中显示出卓越的安全性和疗效。与传统全膝关节置换术相比,机器人辅助系统在假体植入准确性和下肢对线方面取得了明显更好的结果,在严重肢体对线畸形患者中具有特别优势。