Hur Benjamin, Baek Sunin, Kang Inseung, Kim Daekyum
Korea University, School of Mechanical Engineering, 02841, Seoul, South Korea.
Department of Mechanical Engineering, Carnegie Mellon University, Pittsburgh, PA, 15213, USA.
Sci Rep. 2025 Feb 12;15(1):5287. doi: 10.1038/s41598-025-89716-4.
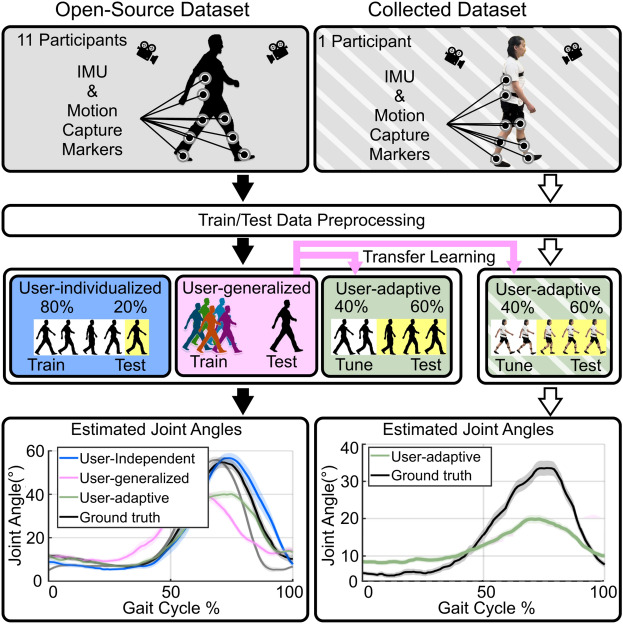
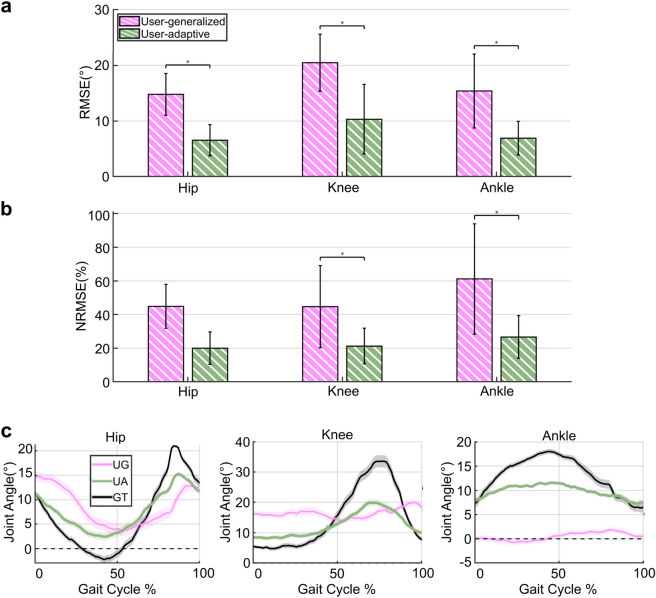
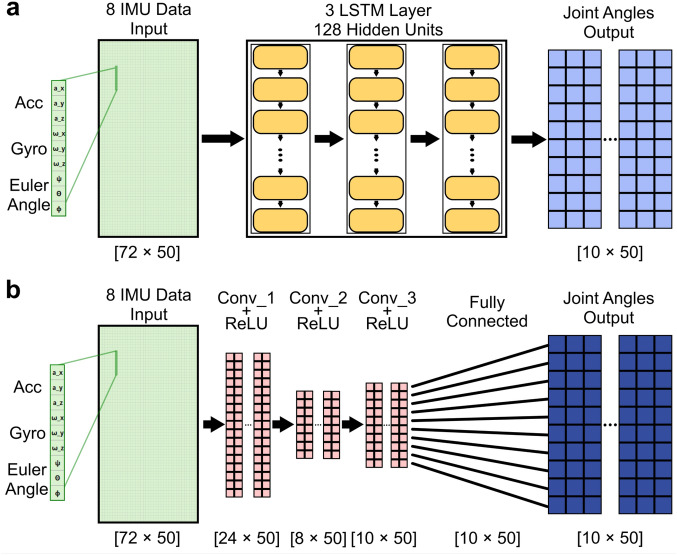
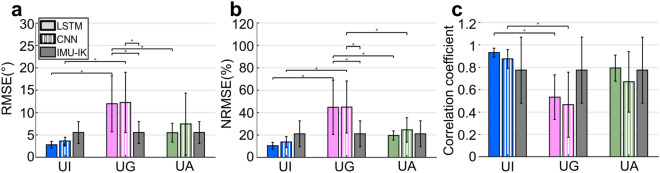
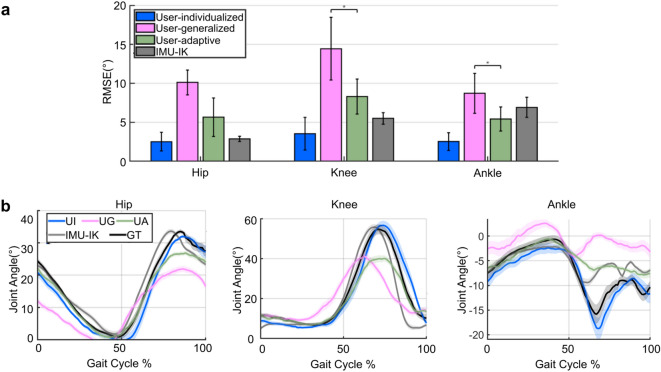
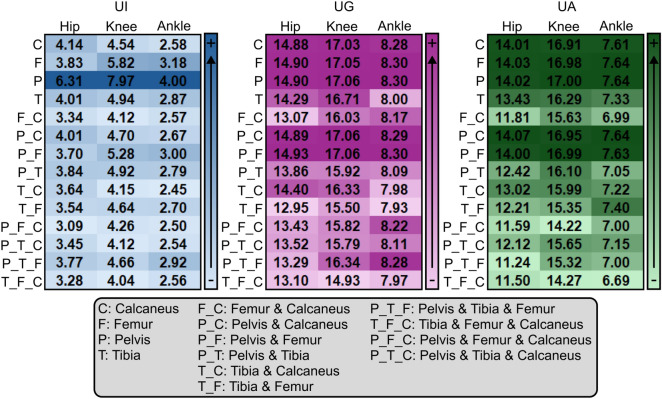
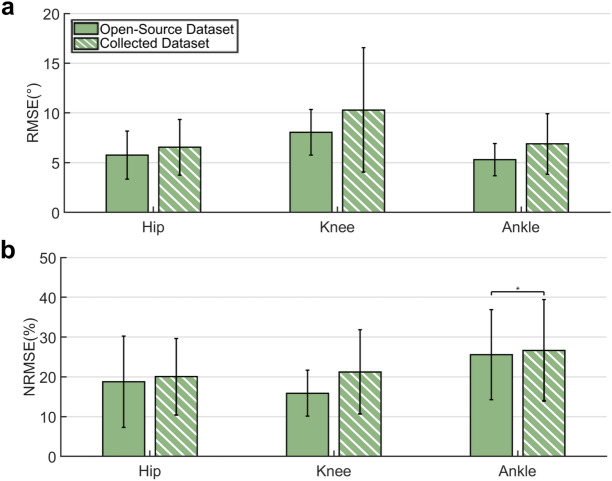
This study introduces a deep learning framework for estimating lower-limb joint kinematics using inertial measurement units (IMUs). While deep learning methods avoid sensor drift, extensive calibration, and complex setup procedures, they require substantial data. To meet this demand, we leveraged an open-source dataset to develop and evaluate three training approaches. The first involved training a model exclusively on data from a single user, resulting in high accuracy for that individual only. The second approach trained a model on data from multiple users to generalize across individuals; however, demonstrated lower accuracy due to variations in gait patterns across users. The third approach added transfer learning to the second, improving estimation accuracy for new users through fine-tuning with a small portion of their data. This model overcame the limitations of the previous methods' dependency on extensive data collection, and achieved comparable performance to inverse kinematics, making it an effective solution for diverse populations. Additionally, our analysis on IMU combinations suggests that IMUs placed on the femur and calcaneus are the best for most cases. This framework not only reduces the need for extensive data collection but also enhances personalized gait analysis, enabling more efficient and accessible applications in both clinical assessments and real-world environments for broader use.
本研究介绍了一种用于使用惯性测量单元(IMU)估计下肢关节运动学的深度学习框架。虽然深度学习方法避免了传感器漂移、大量校准和复杂的设置程序,但它们需要大量数据。为满足这一需求,我们利用一个开源数据集来开发和评估三种训练方法。第一种方法是仅根据单个用户的数据训练模型,这只会为该个体带来高精度。第二种方法是根据多个用户的数据训练模型,以实现跨个体的泛化;然而,由于不同用户步态模式的差异,其准确性较低。第三种方法是在第二种方法的基础上增加迁移学习,通过使用新用户的一小部分数据进行微调来提高对新用户的估计准确性。该模型克服了先前方法对大量数据收集的依赖,并且实现了与逆运动学相当的性能,使其成为适用于不同人群的有效解决方案。此外,我们对IMU组合的分析表明,在大多数情况下,放置在股骨和跟骨上的IMU是最佳选择。该框架不仅减少了对大量数据收集的需求,还增强了个性化步态分析,从而在临床评估和现实环境中实现更高效、更便捷的应用,以供更广泛地使用。