Starup-Hansen Joachim, Newall Nicola, Dimitrakakis Emmanouil, Khan Danyal Z, Dwyer George, Iyengar Keshav, Psychogyios Dimitrios, Hanrahan John G, Sinha Siddharth, Booker James, Stoyanov Danail, Marcus Hani J
Victor Horsley Department of Neurosurgery, National Hospital for Neurology and Neurosurgery, London, United Kingdom.
Wellcome/EPSRC Centre for Interventional and Surgical Sciences, University College London, London, United Kingdom.
J Neurol Surg B Skull Base. 2024 Apr 15;86(2):191-198. doi: 10.1055/a-2297-3647. eCollection 2025 Apr.
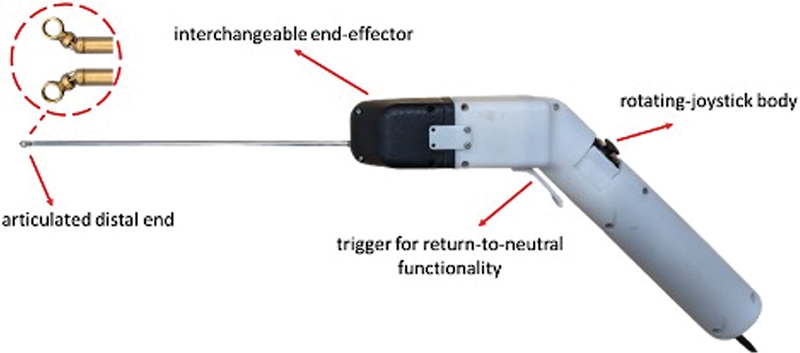
Endoscopic endonasal surgery (EES) has become increasingly popular, yet anatomical constraints posed by the nose and limitations of nonarticulated instruments render EES technically challenging, with a steep associated learning curve. Therefore, we developed a handheld robot to enhance dexterity in endoscopic neurosurgical procedures. A previous trial of the robot demonstrated its potential advantages in endoscopic neurosurgery but also the need for improvements. In this study, we assess the feasibility, acceptability, and comparative performance of the updated robotic prototype (version 0.2) against standard instruments in a preclinical phantom and cadaveric trial. Ethical approval was received. Participants were stratified according to their neurosurgical experience. In the phantom study, a randomized crossover design compared the robot against standard instruments at a phantom tumor resection task. Statistical analysis was performed using Mann-Whitney U tests and paired -tests. In the cadaver-based user study, participants evaluated the device's functional domains through a qualitative interview design. In the phantom study, the device demonstrated a learning curve: initial resection attempts favored the traditional instrument (84% vs. 59%, = 0.055), but parity was achieved by the fifth attempt (80% vs. 83%, = 0.76). Acceptability was evident, as most clinicians (7/8) preferred the robot for its superior range, ergonomics, and precision. Also, the robot exhibited a diminished cognitive workload. The cadaveric study underscored the robot's clinical feasibility, through sufficient workspace reach and force delivery. : Overall, our robot demonstrates promising acceptability and feasibility for endoscopic neurosurgery, yet further iterative developments are required before proceeding to in-human clinical trials.
鼻内镜手术(EES)越来越受欢迎,但鼻子带来的解剖学限制以及非关节式器械的局限性使得EES在技术上具有挑战性,且学习曲线较陡。因此,我们开发了一种手持机器人,以提高内镜神经外科手术的灵活性。之前对该机器人的试验证明了其在内镜神经外科手术中的潜在优势,但也表明需要改进。在本研究中,我们在临床前模型和尸体试验中评估了更新后的机器人原型(0.2版)相对于标准器械的可行性、可接受性和比较性能。获得了伦理批准。参与者根据其神经外科经验进行分层。在模型研究中,采用随机交叉设计,在模型肿瘤切除任务中将机器人与标准器械进行比较。使用曼-惠特尼U检验和配对检验进行统计分析。在基于尸体的用户研究中,参与者通过定性访谈设计评估了该设备的功能领域。在模型研究中,该设备显示出一条学习曲线:最初的切除尝试有利于传统器械(84%对59%,P = 0.055),但在第五次尝试时达到了相当的水平(80%对83%,P = 0.76)。可接受性很明显,因为大多数临床医生(7/8)因其卓越的操作范围、人体工程学设计和精度而更喜欢该机器人。此外,该机器人的认知工作量有所减少。尸体研究通过足够的工作空间范围和力传递强调了该机器人的临床可行性。总体而言,我们的机器人在内镜神经外科手术中显示出有希望的可接受性和可行性,但在进行人体临床试验之前还需要进一步的迭代开发。