Son Kyungmin, Bowal Kimberly, Kim Kwanwoo, Mahadevan L, Kim Ho-Young
Department of Mechanical Engineering, Seoul National University, Seoul 08826, Korea.
School of Engineering and Applied Sciences, Harvard University, Cambridge, MA 02138, USA.
Sci Adv. 2025 May 9;11(19):eadu8326. doi: 10.1126/sciadv.adu8326.
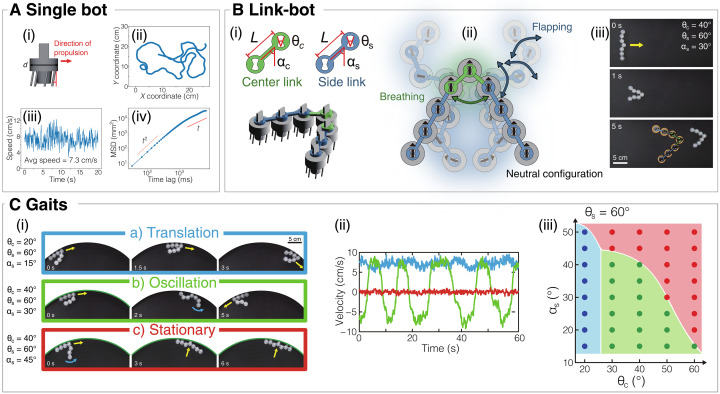
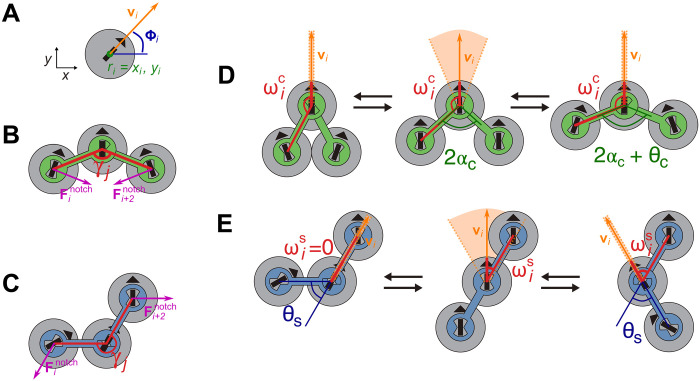
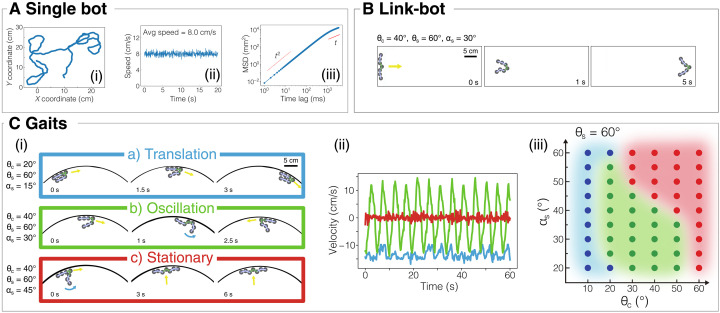
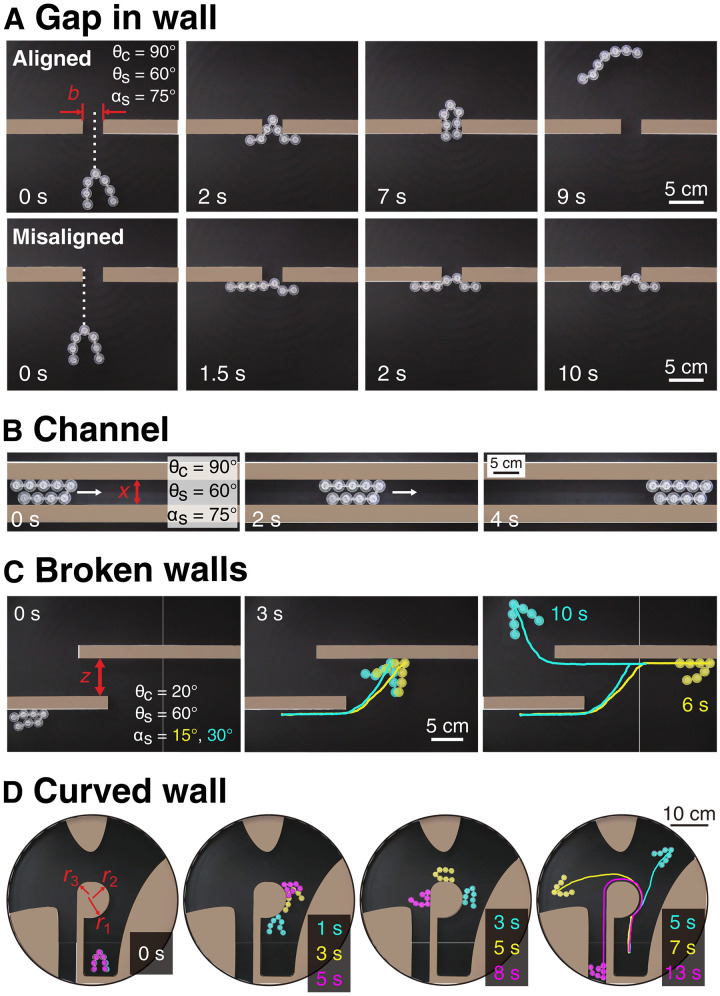
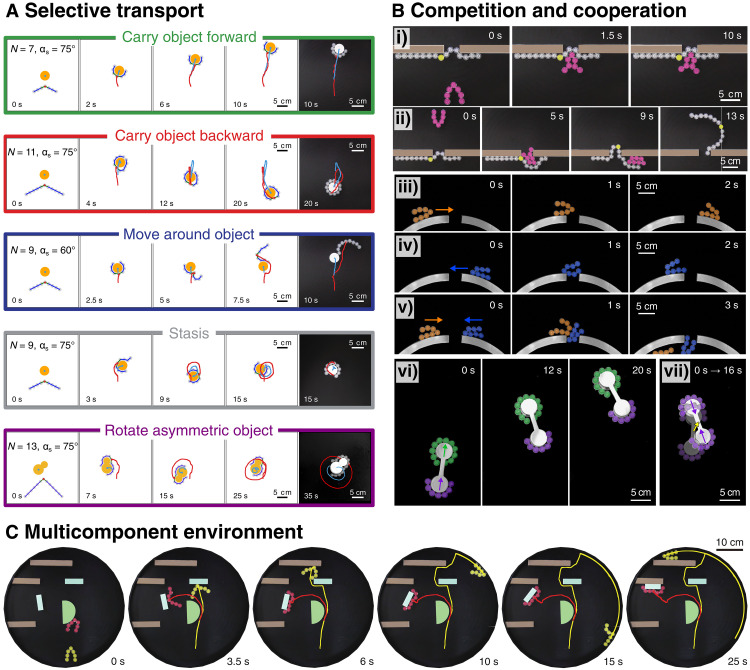
Synthetic active collectives, made of nonliving individuals that cooperatively change group shape and dynamics, hold promise for practical applications and understanding of their natural analogs. We investigate how simple steric interaction constraints between active individuals produce a versatile and functional system using the link-bot: a V-shape-based, single-stranded chain composed of active bots whose dynamics are defined by geometric linking constraints. A variety of emergent properties arises from this active polymer-like system, including locomotion, navigation, transportation, and competitive or cooperative interactions. By adjusting a few link parameters, we show how link-bots can perform diverse tasks, including traversing or obstructing narrow spaces, passing by or enclosing objects, and propelling loads in different directions. Overall, the reconfigurability of link-bots indicates their potential in developing programmable soft robotic systems with simple components and materials at any scale.
由非生物个体组成的合成活性聚集体能够协同改变群体形状和动力学,这为实际应用以及理解其天然类似物带来了希望。我们研究了活性个体之间简单的空间相互作用约束如何利用链接机器人产生一个多功能且实用的系统:一种基于V形的单链,由活性机器人组成,其动力学由几何链接约束定义。这个类似活性聚合物的系统产生了多种涌现特性,包括运动、导航、运输以及竞争或合作相互作用。通过调整几个链接参数,我们展示了链接机器人如何执行各种任务,包括穿越或阻塞狭窄空间、绕过或包围物体以及向不同方向推进负载。总体而言,链接机器人的可重构性表明它们在开发具有简单组件和材料、可在任何规模下运行的可编程软机器人系统方面具有潜力。