Chowdhury Sayeed Shafayet, Sharma Deepika, Kosta Adarsh, Roy Kaushik
Elmore Family School of Electrical and Computer Engineering, Purdue University, West Lafayette, IN, 47907, USA.
Commun Eng. 2025 Aug 13;4(1):152. doi: 10.1038/s44172-025-00492-5.
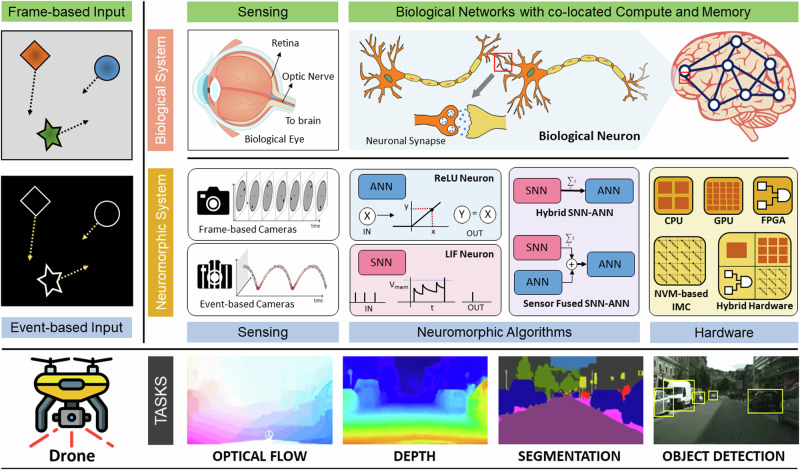
Neuromorphic computing offers transformative potential for AI in resource-constrained environments by mimicking biological neural efficiency. This perspective article analyzes recent advances and future directions, advocating a system design approach that integrates specialized sensing (e.g., event-based cameras), brain-inspired algorithms (SNNs and SNN-ANN hybrids), and dedicated neuromorphic hardware. Using vision-based drone navigation (VDN) as an exemplar-drawing parallels with biological systems like Drosophila-we demonstrate how these components enable event-driven processing and overcome von Neumann architecture limitations through near-/in-memory computing. Key challenges include large-scale integration, benchmarking standardization, and algorithm-hardware co-design for emerging applications, which we discuss alongside current and future research directions.
神经形态计算通过模仿生物神经的高效性,为资源受限环境中的人工智能提供了变革性潜力。这篇观点文章分析了近期的进展和未来方向,倡导一种集成了专门传感(如基于事件的相机)、受大脑启发的算法(脉冲神经网络和脉冲神经网络-人工神经网络混合体)以及专用神经形态硬件的系统设计方法。以基于视觉的无人机导航(VDN)为例——将其与果蝇等生物系统进行类比——我们展示了这些组件如何实现事件驱动处理,并通过近内存/内存内计算克服冯·诺依曼架构的局限性。关键挑战包括大规模集成、基准测试标准化以及针对新兴应用的算法-硬件协同设计,我们将在讨论当前和未来研究方向的同时探讨这些挑战。