Liu J, Cramer S C, Reinkensmeyer D J
Department of Mechanical and Aerospace Engineering, University of California, Irvine, CA, USA.
J Neuroeng Rehabil. 2006 Aug 31;3:20. doi: 10.1186/1743-0003-3-20.
Mechanical guidance with a robotic device is a candidate technique for teaching people desired movement patterns during motor rehabilitation, surgery, and sports training, but it is unclear how effective this approach is as compared to visual demonstration alone. Further, little is known about motor learning and retention involved with either robot-mediated mechanical guidance or visual demonstration alone.
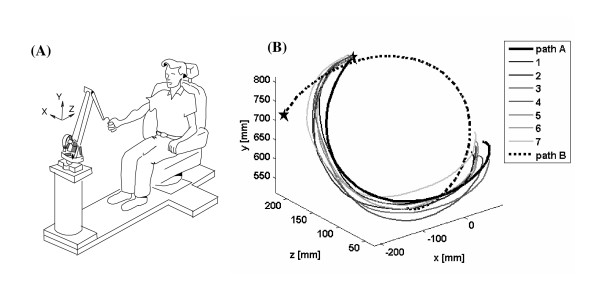
Healthy subjects (n = 20) attempted to reproduce a novel three-dimensional path after practicing it with mechanical guidance from a robot. Subjects viewed their arm as the robot guided it, so this "haptic guidance" training condition provided both somatosensory and visual input. Learning was compared to reproducing the movement following only visual observation of the robot moving along the path, with the hand in the lap (the "visual demonstration" training condition). Retention was assessed periodically by instructing the subjects to reproduce the path without robotic demonstration.
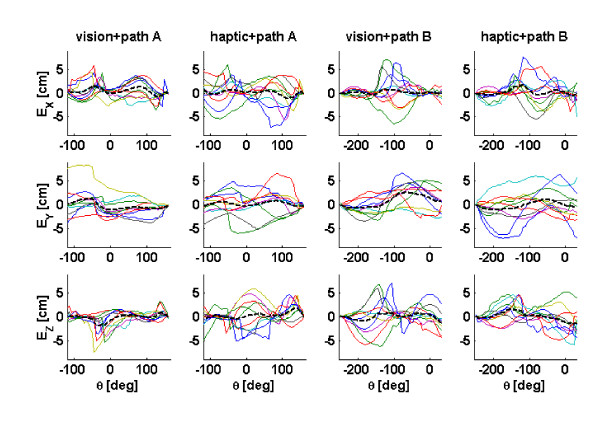
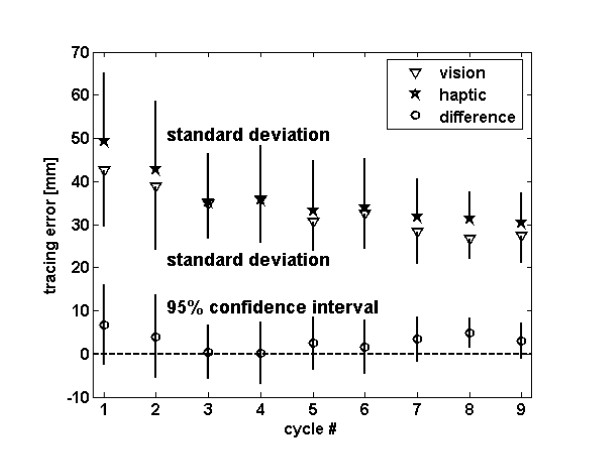
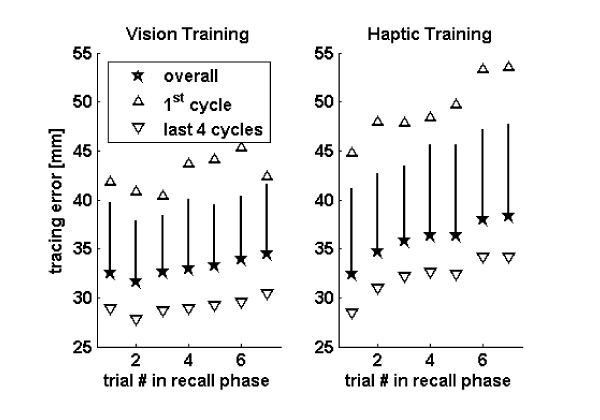
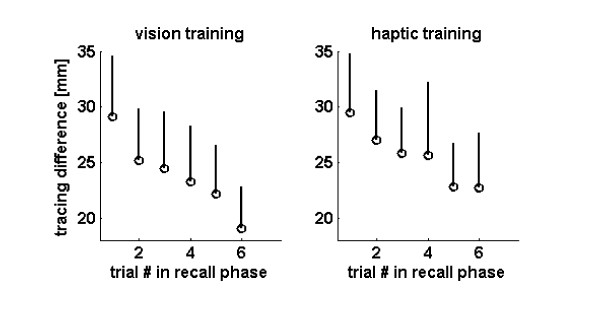
Subjects improved in ability to reproduce the path following practice in the haptic guidance or visual demonstration training conditions, as evidenced by a 30-40% decrease in spatial error across 126 movement attempts in each condition. Performance gains were not significantly different between the two techniques, but there was a nearly significant trend for the visual demonstration condition to be better than the haptic guidance condition (p = 0.09). The 95% confidence interval of the mean difference between the techniques was at most 25% of the absolute error in the last cycle. When asked to reproduce the path repeatedly following either training condition, the subjects' performance degraded significantly over the course of a few trials. The tracing errors were not random, but instead were consistent with a systematic evolution toward another path, as if being drawn to an "attractor path".
These results indicate that both forms of robotic demonstration can improve short-term performance of a novel desired path. The availability of both haptic and visual input during the haptic guidance condition did not significantly improve performance compared to visual input alone in the visual demonstration condition. Further, the motor system is inclined to repeat its previous mistakes following just a few movements without robotic demonstration, but these systematic errors can be reduced with periodic training.
使用机器人设备进行机械引导是一种在运动康复、手术和体育训练中教授人们所需运动模式的候选技术,但与仅通过视觉示范相比,这种方法的效果尚不清楚。此外,对于机器人介导的机械引导或仅视觉示范所涉及的运动学习和记忆知之甚少。
健康受试者(n = 20)在机器人的机械引导下练习一条新颖的三维路径后,尝试重现该路径。受试者在机器人引导其手臂时观察自己的手臂,因此这种“触觉引导”训练条件同时提供了体感和视觉输入。将学习效果与仅通过视觉观察机器人沿着路径移动(手放在腿上)后重现该运动的情况进行比较(“视觉示范”训练条件)。通过指示受试者在没有机器人示范的情况下重现路径来定期评估记忆情况。
在触觉引导或视觉示范训练条件下练习后,受试者重现路径的能力有所提高,每种条件下126次运动尝试的空间误差减少了30 - 40%,证明了这一点。两种技术之间的性能提升没有显著差异,但视觉示范条件略优于触觉引导条件的趋势接近显著(p = 0.09)。两种技术之间平均差异的95%置信区间最多为最后一个周期绝对误差的25%。在任何一种训练条件下被要求重复重现路径时,受试者的表现会在几次试验过程中显著下降。追踪误差不是随机的,而是与向另一条路径的系统演变一致,就好像被吸引到一条“吸引路径”。
这些结果表明,两种形式的机器人示范都可以提高对新颖期望路径的短期表现。与视觉示范条件下仅视觉输入相比,触觉引导条件下体感和视觉输入的可用性并没有显著提高表现。此外,在没有机器人示范的情况下,运动系统在仅进行几次运动后就倾向于重复之前的错误,但这些系统误差可以通过定期训练来减少。