Robotics Brain and Cognitive Science Dept, Italian Institute of Technology, Genoa, Italy.
J Neuroeng Rehabil. 2009 Dec 7;6:44. doi: 10.1186/1743-0003-6-44.
In the last two decades robot training in neuromotor rehabilitation was mainly focused on shoulder-elbow movements. Few devices were designed and clinically tested for training coordinated movements of the wrist, which are crucial for achieving even the basic level of motor competence that is necessary for carrying out ADLs (activities of daily life). Moreover, most systems of robot therapy use point-to-point reaching movements which tend to emphasize the pathological tendency of stroke patients to break down goal-directed movements into a number of jerky sub-movements. For this reason we designed a wrist robot with a range of motion comparable to that of normal subjects and implemented a self-adapting training protocol for tracking smoothly moving targets in order to facilitate the emergence of smoothness in the motor control patterns and maximize the recovery of the normal RoM (range of motion) of the different DoFs (degrees of Freedom).
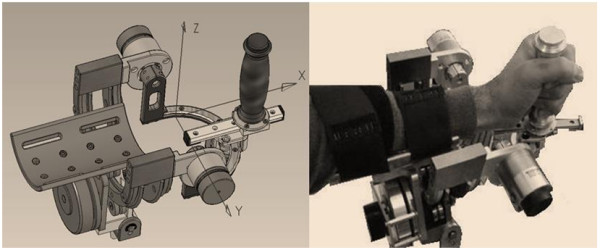
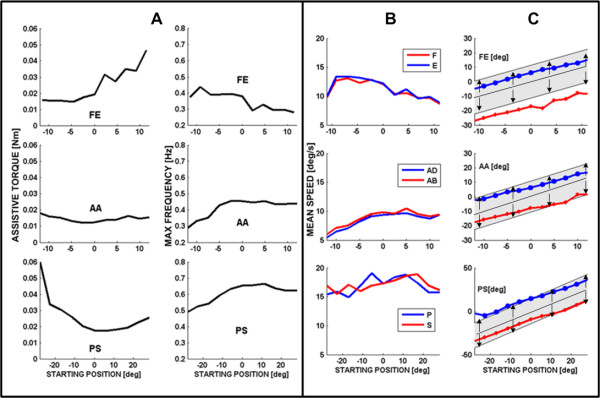
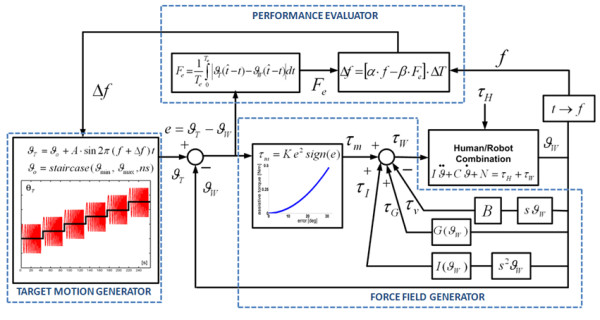
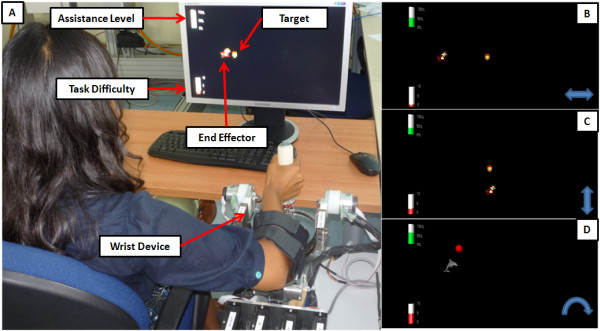
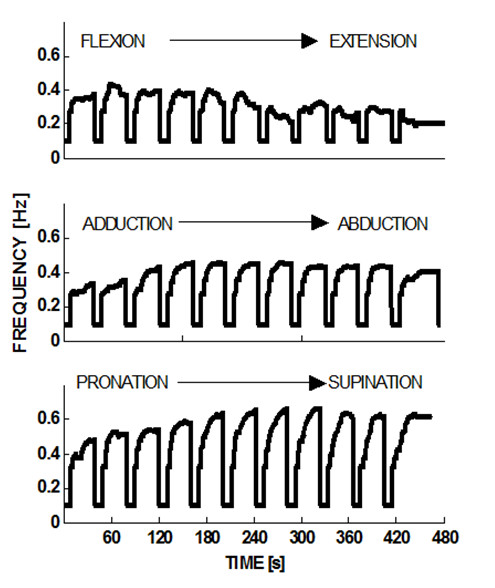
The IIT-wrist robot is a 3 DoFs light exoskeleton device, with direct-drive of each DoF and a human-like range of motion for Flexion/Extension (FE), Abduction/Adduction (AA) and Pronation/Supination (PS). Subjects were asked to track a variable-frequency oscillating target using only one wrist DoF at time, in such a way to carry out a progressive splinting therapy. The RoM of each DoF was angularly scanned in a staircase-like fashion, from the "easier" to the "more difficult" angular position. An Adaptive Controller evaluated online performance parameters and modulated both the assistance and the difficulty of the task in order to facilitate smoother and more precise motor command patterns.
Three stroke subjects volunteered to participate in a preliminary test session aimed at verify the acceptability of the device and the feasibility of the designed protocol. All of them were able to perform the required task. The wrist active RoM of motion was evaluated for each patient at the beginning and at the end of the test therapy session and the results suggest a positive trend.
The positive outcomes of the preliminary tests motivate the planning of a clinical trial and provide experimental evidence for defining appropriate inclusion/exclusion criteria.
在过去的二十年中,神经运动康复中的机器人训练主要集中在肩肘运动上。很少有设备被设计和临床测试用于训练手腕的协调运动,而这些运动对于实现日常生活活动(ADLs)所需的基本运动能力至关重要。此外,大多数机器人治疗系统使用点对点的到达运动,这些运动往往强调中风患者将目标导向运动分解为多个不连贯的子运动的病理性倾向。出于这个原因,我们设计了一种具有与正常受试者相当的运动范围的手腕机器人,并实施了一种自适应训练协议,用于跟踪平滑移动的目标,以促进运动控制模式的平滑度的出现,并最大限度地恢复不同自由度的正常运动范围(ROM)。
IIT-wrist 机器人是一种 3 自由度的轻型外骨骼设备,每个自由度都采用直接驱动,运动范围与人相似,包括屈曲/伸展(FE)、外展/内收(AA)和旋前/旋后(PS)。要求受试者仅使用一个手腕自由度跟踪一个变频率的振荡目标,从而进行渐进式夹板治疗。每个自由度的 ROM 以阶梯式方式进行角度扫描,从“较容易”到“较难”的角度位置。自适应控制器在线评估性能参数,并调节辅助和任务难度,以促进更平滑、更精确的运动指令模式。
三名中风患者自愿参加了一个初步测试,旨在验证设备的可接受性和设计协议的可行性。他们都能够完成所需的任务。在测试治疗开始和结束时,对每位患者的手腕主动运动 ROM 进行了评估,结果表明存在积极的趋势。
初步测试的积极结果促使我们计划进行临床试验,并为定义适当的纳入/排除标准提供实验证据。