Departamento de Ingeniería Rural y Agroalimentaria, Universidad Politécnica de Valencia, Camino de Vera s/n, 46022 Valencia, Spain.
Sensors (Basel). 2010;10(12):11226-47. doi: 10.3390/s101211226. Epub 2010 Dec 8.
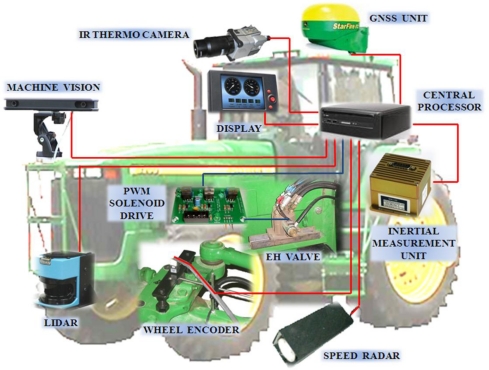
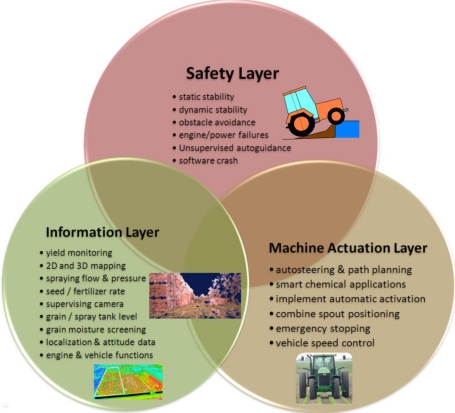
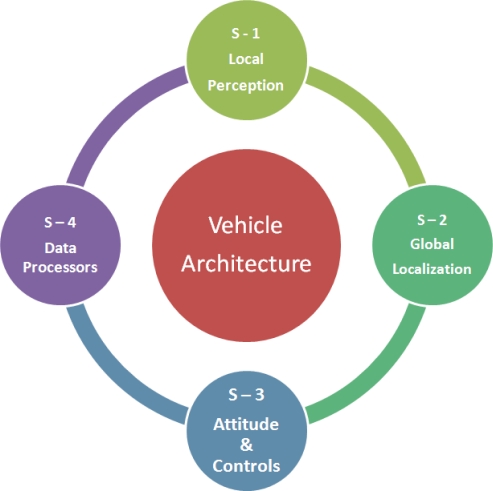
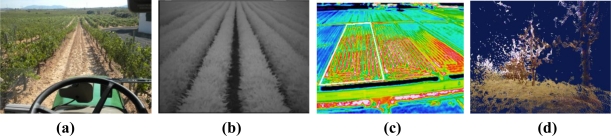
The long time wish of endowing agricultural vehicles with an increasing degree of autonomy is becoming a reality thanks to two crucial facts: the broad diffusion of global positioning satellite systems and the inexorable progress of computers and electronics. Agricultural vehicles are currently the only self-propelled ground machines commonly integrating commercial automatic navigation systems. Farm equipment manufacturers and satellite-based navigation system providers, in a joint effort, have pushed this technology to unprecedented heights; yet there are many unresolved issues and an unlimited potential still to uncover. The complexity inherent to intelligent vehicles is rooted in the selection and coordination of the optimum sensors, the computer reasoning techniques to process the acquired data, and the resulting control strategies for automatic actuators. The advantageous design of the network of onboard sensors is necessary for the future deployment of advanced agricultural vehicles. This article analyzes a variety of typical environments and situations encountered in agricultural fields, and proposes a sensor architecture especially adapted to cope with them. The strategy proposed groups sensors into four specific subsystems: global localization, feedback control and vehicle pose, non-visual monitoring, and local perception. The designed architecture responds to vital vehicle tasks classified within three layers devoted to safety, operative information, and automatic actuation. The success of this architecture, implemented and tested in various agricultural vehicles over the last decade, rests on its capacity to integrate redundancy and incorporate new technologies in a practical way.
由于两个关键因素,赋予农业车辆更高程度自主性的长期愿望正在成为现实:广泛普及的全球定位卫星系统和计算机与电子技术的必然进步。目前,农业车辆是唯一普遍集成商用自动导航系统的自行式地面机器。农业设备制造商和基于卫星的导航系统供应商共同努力,将这项技术推向了前所未有的高度;然而,仍有许多未解决的问题和无限的潜力有待挖掘。智能车辆固有的复杂性源于最佳传感器的选择和协调、用于处理所获取数据的计算机推理技术,以及自动执行器的相应控制策略。用于未来部署先进农业车辆的车载传感器网络的有利设计是必要的。本文分析了农业领域中遇到的各种典型环境和情况,并提出了一种特别适用于应对这些情况的传感器架构。所提出的策略将传感器分为四个特定的子系统:全局定位、反馈控制和车辆姿态、非视觉监测和局部感知。设计的架构响应了三个层面上的重要车辆任务,分别是安全、操作信息和自动执行。该架构在过去十年中在各种农业车辆中得到了实施和测试,其成功基于其集成冗余和以实际方式纳入新技术的能力。