Department of Bioengineering, Stanford University, Stanford, California 94305, USA.
Nat Nanotechnol. 2012 Feb 19;7(4):252-6. doi: 10.1038/nnano.2012.19.
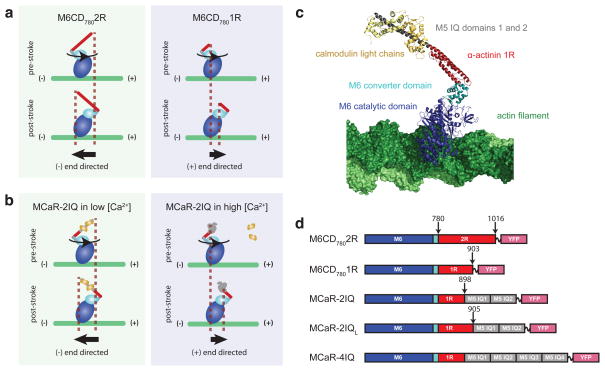
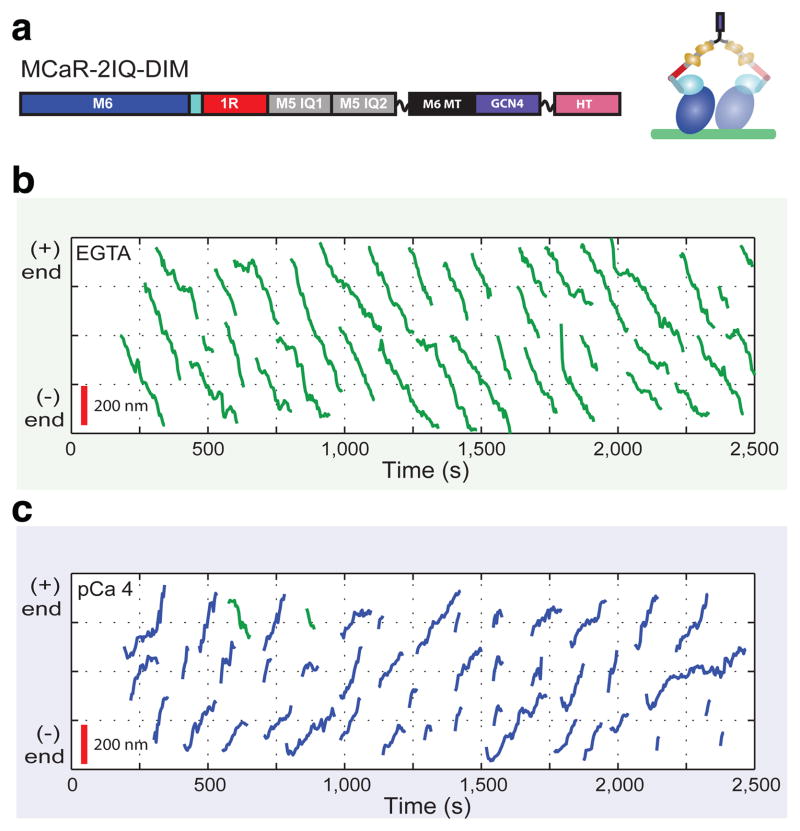
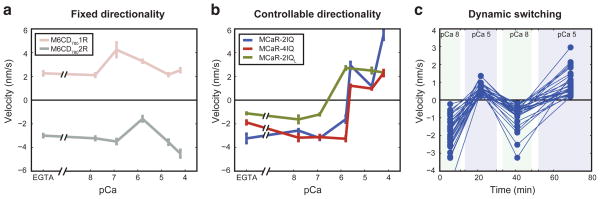
Cytoskeletal motors drive the transport of organelles and molecular cargoes within cells and have potential applications in molecular detection and diagnostic devices. Engineering molecular motors with controllable properties will allow selective perturbation of mechanical processes in living cells and provide optimized device components for tasks such as molecular sorting and directed assembly. Biological motors have previously been modified by introducing activation/deactivation switches that respond to metal ions and other signals. Here, we show that myosin motors can be engineered to reversibly change their direction of motion in response to a calcium signal. Building on previous protein engineering studies and guided by a structural model for the redirected power stroke of myosin VI, we have constructed bidirectional myosins through the rigid recombination of structural modules. The performance of the motors was confirmed using gliding filament assays and single fluorophore tracking. Our strategy, in which external signals trigger changes in the geometry and mechanics of myosin lever arms, should make it possible to achieve spatiotemporal control over a range of motor properties including processivity, stride size and branchpoint turning.
细胞骨架马达驱动细胞器和分子货物在细胞内的运输,在分子检测和诊断设备中有潜在的应用。工程化具有可控性质的分子马达将允许选择性地干扰活细胞中的机械过程,并为分子分拣和定向组装等任务提供优化的器件组件。以前通过引入响应金属离子和其他信号的激活/失活开关来修饰生物马达。在这里,我们表明肌球蛋白马达可以被工程化以响应钙信号而可逆地改变其运动方向。在以前的蛋白质工程研究的基础上,并受肌球蛋白 VI 重定向动力冲程结构模型的指导,我们通过刚性重组结构模块构建了双向肌球蛋白。使用滑行丝实验和单荧光标记跟踪来确认了马达的性能。我们的策略是外部信号触发肌球蛋白杠杆臂的几何形状和力学变化,这应该可以实现对一系列马达特性(包括连续性、步幅大小和分支点转弯)的时空控制。