Schreuder Henk W R, Persson Jan E U, Wolswijk Richard G H, Ihse Ingmar, Schijven Marlies P, Verheijen René H M
Division of Women and Baby, Department of Reproductive Medicine and Gynaecology, University Medical Centre Utrecht, P.O. Box 85500, Room F05-126, 3508 GA Utrecht, The Netherlands.
Department of Obstetrics & Gynaecology, Skåne University Hospital, Tornavagen 10, 221 85 Lund, Sweden.
ScientificWorldJournal. 2014 Jan 30;2014:507076. doi: 10.1155/2014/507076. eCollection 2014.
With the increase in robotic-assisted laparoscopic surgery there is a concomitant rising demand for training methods. The objective was to establish face and construct validity of a novel virtual reality simulator (dV-Trainer, Mimic Technologies, Seattle, WA) for the use in training of robot-assisted surgery.
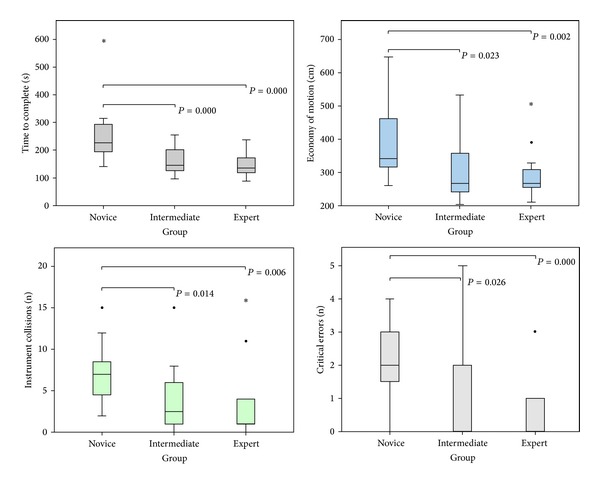
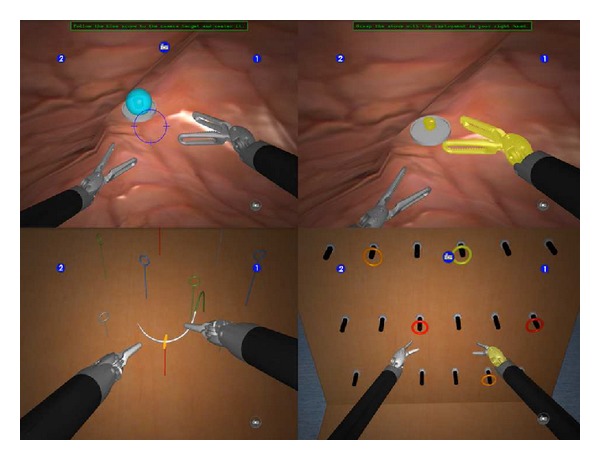
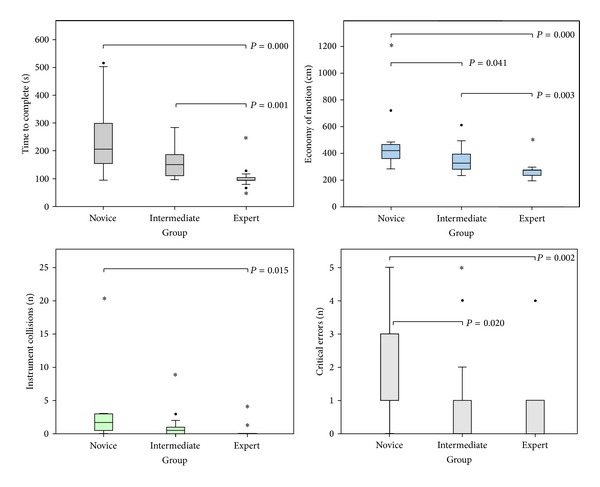
A comparative cohort study was performed. Participants (n = 42) were divided into three groups according to their robotic experience. To determine construct validity, participants performed three different exercises twice. Performance parameters were measured. To determine face validity, participants filled in a questionnaire after completion of the exercises.
Experts outperformed novices in most of the measured parameters. The most discriminative parameters were "time to complete" and "economy of motion" (P < 0.001). The training capacity of the simulator was rated 4.6 ± 0.5 SD on a 5-point Likert scale. The realism of the simulator in general, visual graphics, movements of instruments, interaction with objects, and the depth perception were all rated as being realistic. The simulator is considered to be a very useful training tool for residents and medical specialist starting with robotic surgery.
Face and construct validity for the dV-Trainer could be established. The virtual reality simulator is a useful tool for training robotic surgery.
随着机器人辅助腹腔镜手术的增加,对培训方法的需求也随之上升。目的是建立一种新型虚拟现实模拟器(dV-Trainer,Mimic Technologies,西雅图,华盛顿州)在机器人辅助手术培训中使用的表面效度和结构效度。
进行了一项比较队列研究。参与者(n = 42)根据其机器人手术经验分为三组。为了确定结构效度,参与者对三种不同的练习各进行两次。测量性能参数。为了确定表面效度,参与者在练习完成后填写一份问卷。
在大多数测量参数方面,专家的表现优于新手。最具区分性的参数是“完成时间”和“动作经济性”(P < 0.001)。模拟器的培训能力在5点李克特量表上的评分为4.6 ± 0.5标准差。模拟器的真实感,总体视觉图形、器械运动、与物体的交互以及深度感知均被评为逼真。该模拟器被认为是供刚开始进行机器人手术的住院医生和医学专家使用的非常有用的培训工具。
可以建立dV-Trainer的表面效度和结构效度。虚拟现实模拟器是培训机器人手术的有用工具。