Liu Taoming, Cavuşoğlu M Cenk
The authors are with the department of Electrical Engineering and Computer Science (EECS), Case Western Reserve University, Cleveland, OH, 44106 USA.
IEEE Int Conf Robot Autom. 2014;2014:4393-4398. doi: 10.1109/ICRA.2014.6907499.
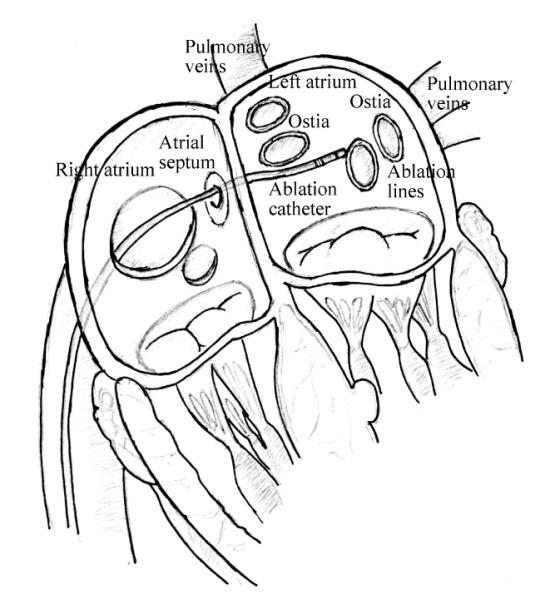
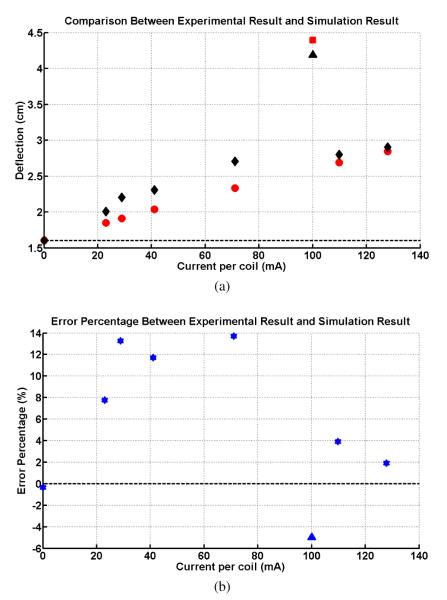
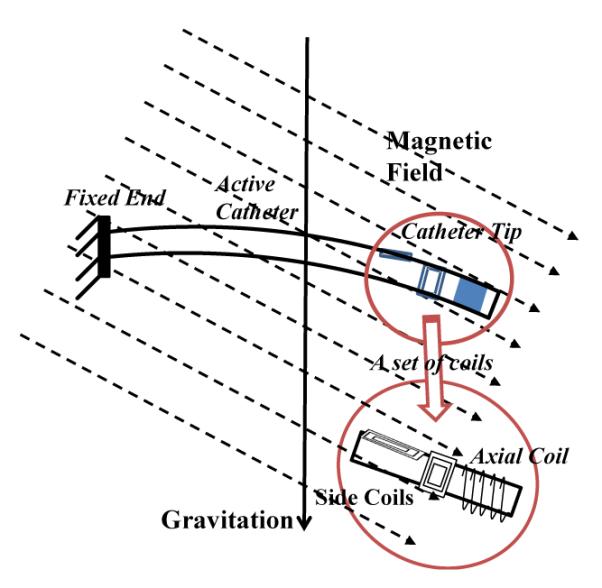
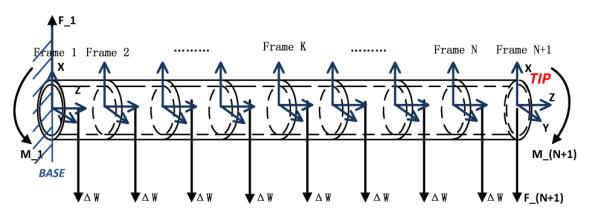
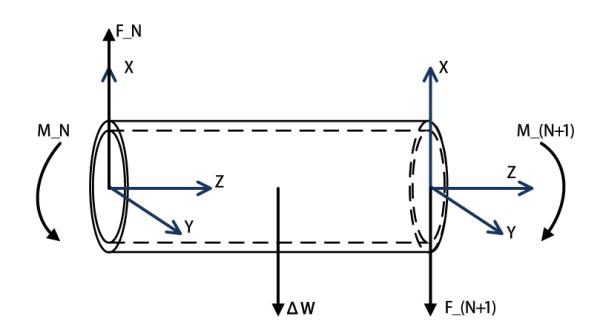
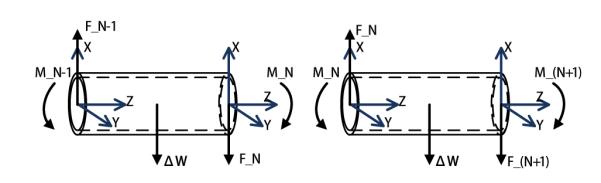
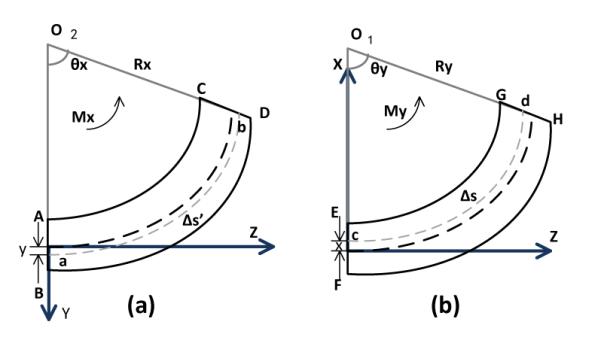
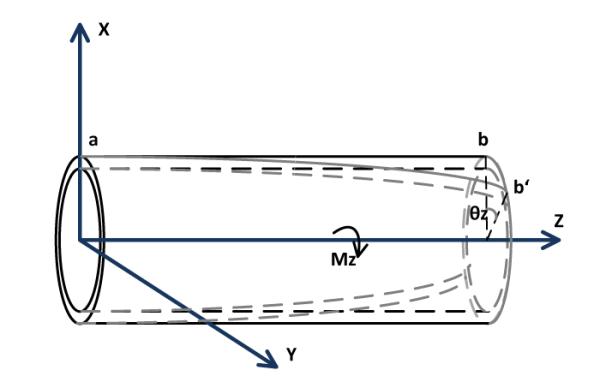
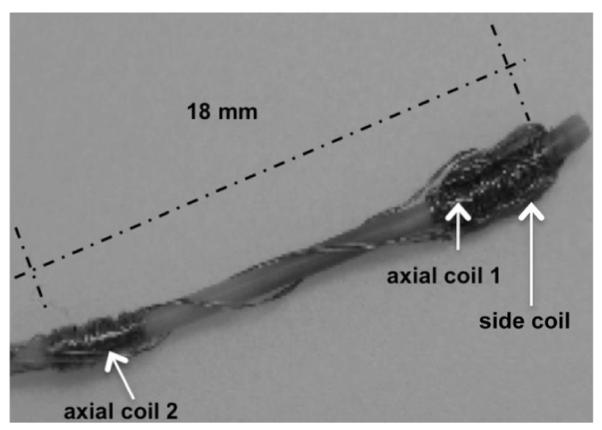
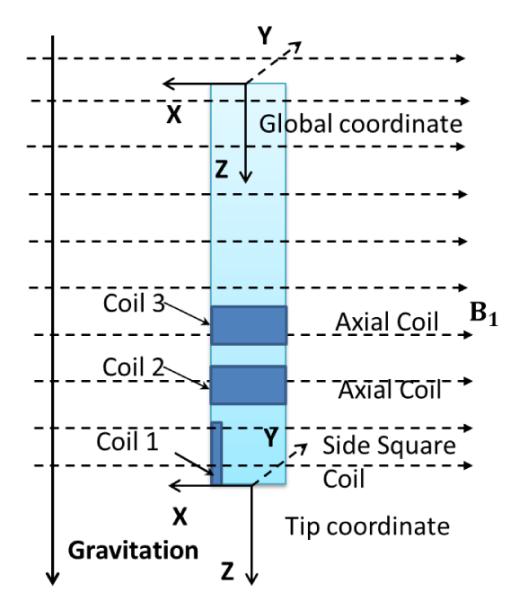
This paper presents the three dimensional kinematic modeling of a novel steerable robotic ablation catheter system. The catheter, embedded with a set of current-carrying micro-coils, is actuated by the magnetic forces generated by the magnetic field of the MRI scanner. This paper develops a 3D model of the MRI actuated steerable catheter system by using finite differences approach. For each finite segment, a quasi-static torque-deflection equilibrium equation is calculated using beam theory. By using the deflection displacements and torsion angles, the kinematic modeling of the catheter system is derived. The proposed models are evaluated by comparing the simulation results of the proposed model with the experimental results of a proof-of-concept prototype.
本文介绍了一种新型可转向机器人消融导管系统的三维运动学建模。该导管嵌入了一组载流微线圈,由MRI扫描仪的磁场产生的磁力驱动。本文采用有限差分法建立了MRI驱动的可转向导管系统的三维模型。对于每个有限段,使用梁理论计算准静态扭矩-挠度平衡方程。通过使用挠曲位移和扭转角,推导了导管系统的运动学模型。通过将所提模型的仿真结果与概念验证原型的实验结果进行比较,对所提模型进行了评估。