Conesa-Muñoz Jesús, Gonzalez-de-Soto Mariano, Gonzalez-de-Santos Pablo, Ribeiro Angela
Centre for Automation and Robotics, (CSIC-UPM), Arganda del Rey, 28500 Madrid, Spain.
Sensors (Basel). 2015 Mar 5;15(3):5402-28. doi: 10.3390/s150305402.
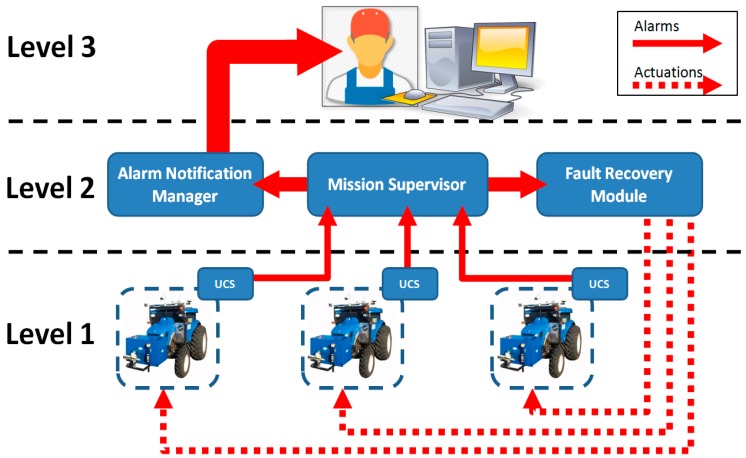
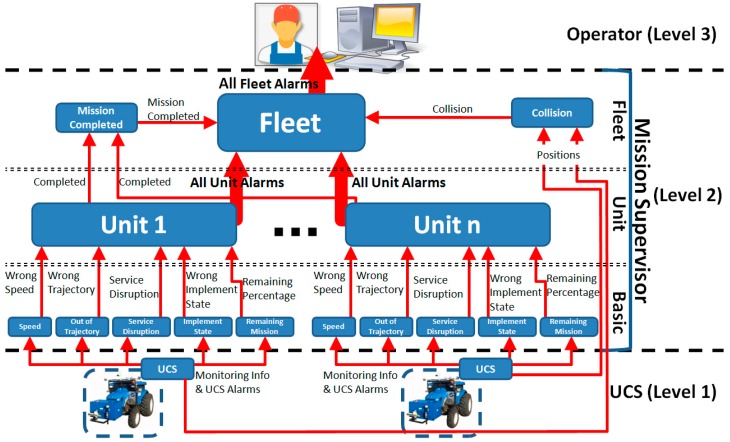
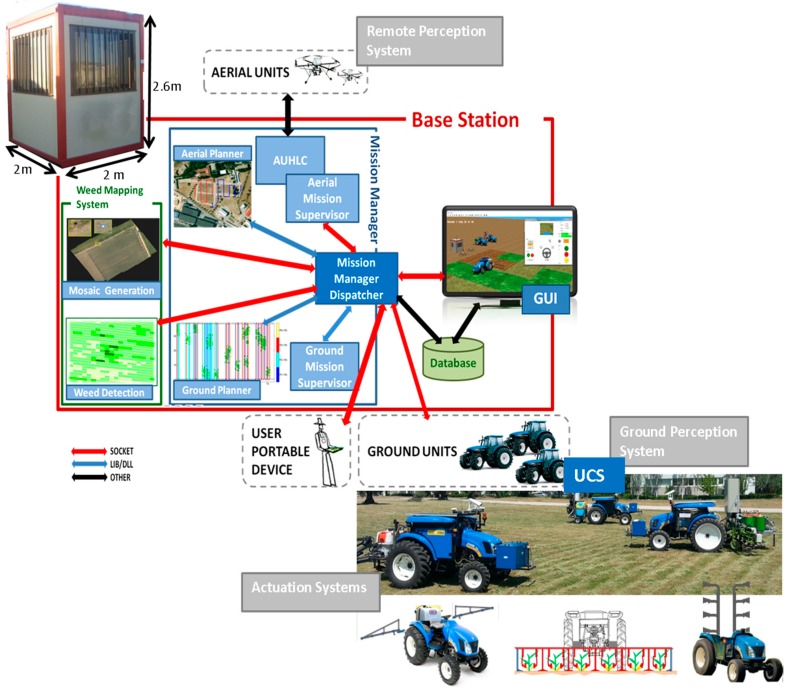
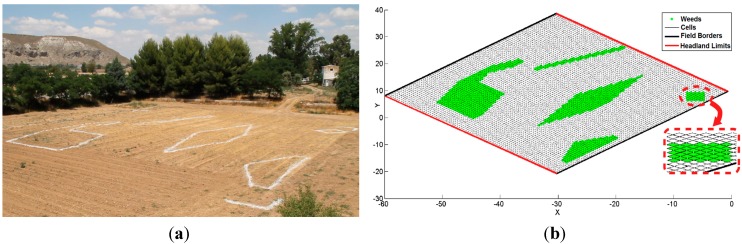
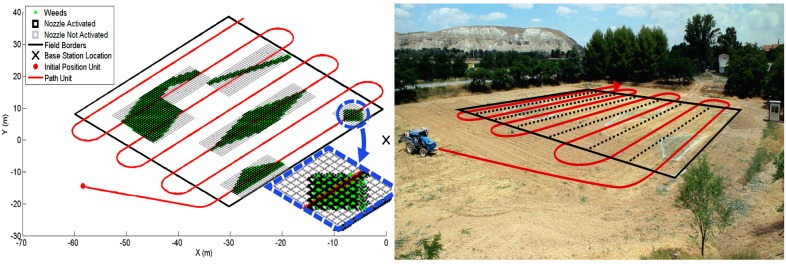
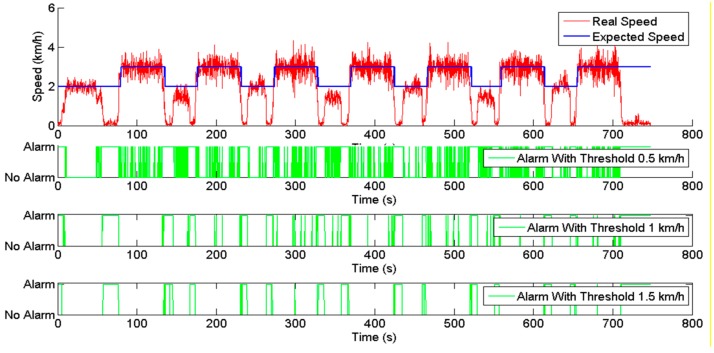
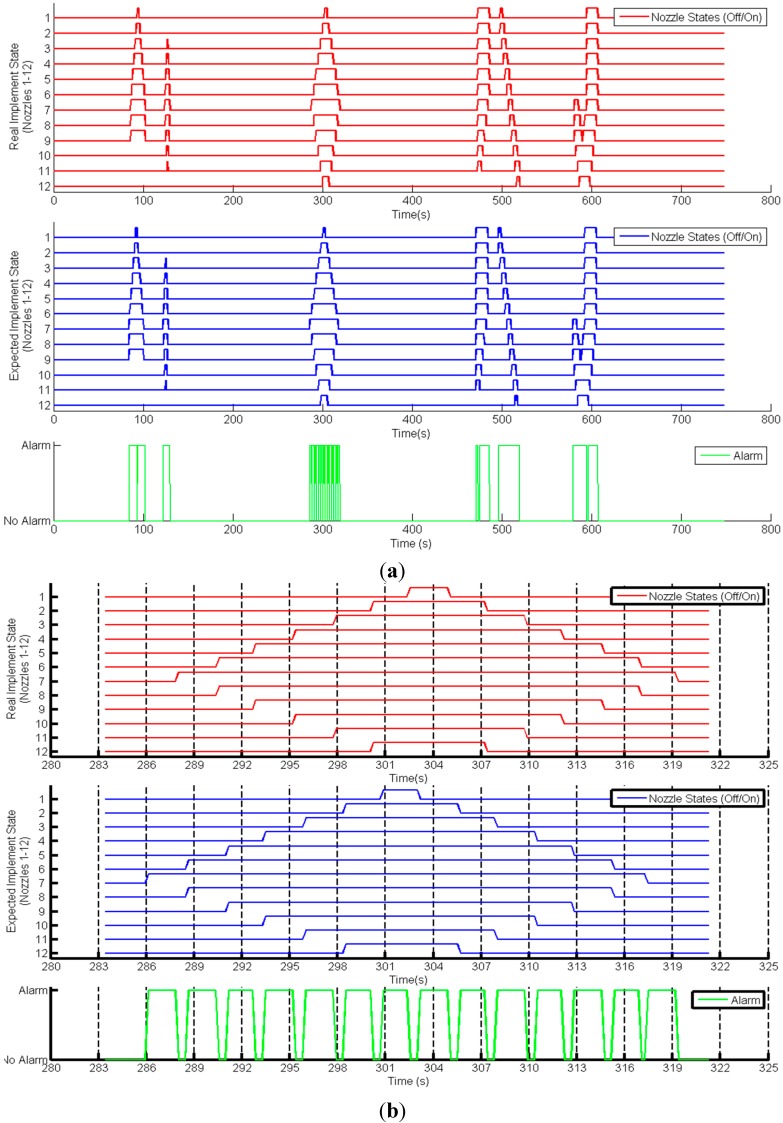
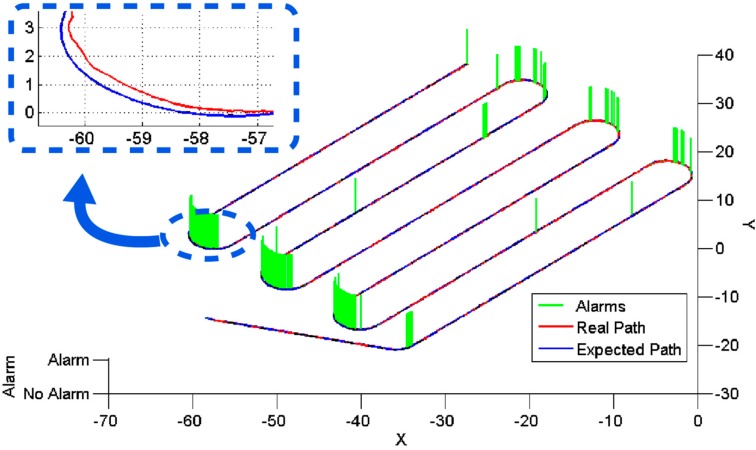
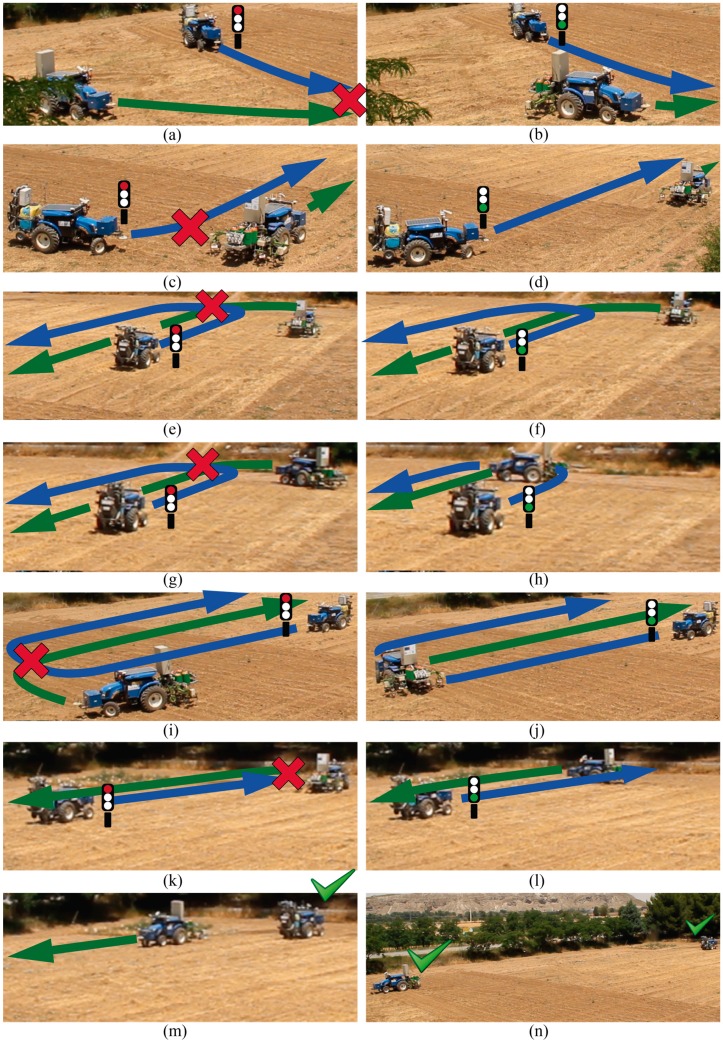
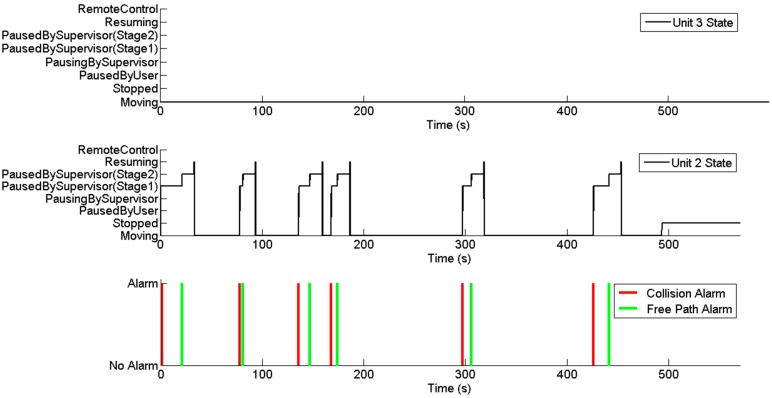
This paper describes a supervisor system for monitoring the operation of automated agricultural vehicles. The system analyses all of the information provided by the sensors and subsystems on the vehicles in real time and notifies the user when a failure or potentially dangerous situation is detected. In some situations, it is even able to execute a neutralising protocol to remedy the failure. The system is based on a distributed and multi-level architecture that divides the supervision into different subsystems, allowing for better management of the detection and repair of failures. The proposed supervision system was developed to perform well in several scenarios, such as spraying canopy treatments against insects and diseases and selective weed treatments, by either spraying herbicide or burning pests with a mechanical-thermal actuator. Results are presented for selective weed treatment by the spraying of herbicide. The system successfully supervised the task; it detected failures such as service disruptions, incorrect working speeds, incorrect implement states, and potential collisions. Moreover, the system was able to prevent collisions between vehicles by taking action to avoid intersecting trajectories. The results show that the proposed system is a highly useful tool for managing fleets of autonomous vehicles. In particular, it can be used to manage agricultural vehicles during treatment operations.
本文介绍了一种用于监测自动农用车辆运行情况的监控系统。该系统实时分析车辆上传感器和子系统提供的所有信息,并在检测到故障或潜在危险情况时通知用户。在某些情况下,它甚至能够执行中和协议来修复故障。该系统基于分布式多级架构,将监控分为不同的子系统,从而能够更好地管理故障检测和修复。所提出的监控系统旨在在多种场景中表现良好,例如通过喷洒杀虫剂和杀菌剂进行树冠处理以及通过喷洒除草剂或使用机械热执行器烧死害虫进行选择性杂草处理。给出了通过喷洒除草剂进行选择性杂草处理的结果。该系统成功地监督了任务;它检测到诸如服务中断、工作速度不正确、农具状态不正确以及潜在碰撞等故障。此外,该系统能够通过采取行动避免相交轨迹来防止车辆之间的碰撞。结果表明,所提出的系统是管理自动驾驶车辆车队的非常有用的工具。特别是,它可用于在处理操作期间管理农用车辆。