Rozeboom Esther D, Broeders Ivo A M J, Fockens Paul
Department of Robotics and Mechatronics, Faculty of Electrical Engineering, University of Twente, P.O. Box 217, 7500 AE, Enschede, The Netherlands.
Department of Robotics and Mechatronics, University of Twente, Enschede, The Netherlands.
J Robot Surg. 2015 Sep;9(3):173-8. doi: 10.1007/s11701-015-0511-6. Epub 2015 May 10.
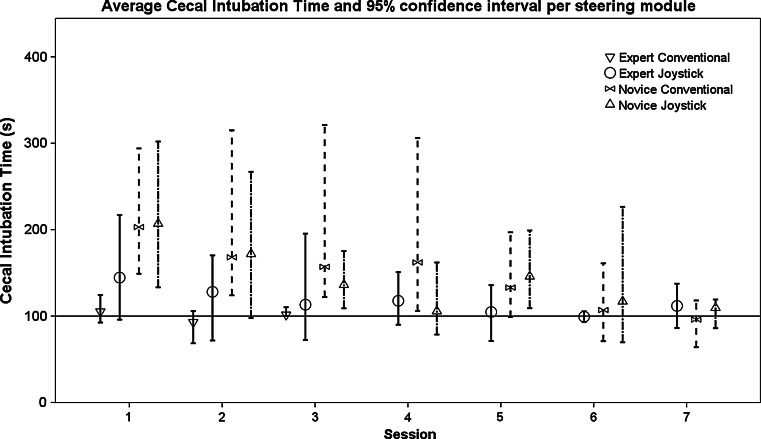
The flexible endoscope is increasingly used to perform minimal invasive interventions. A novel add-on platform allows single-person control of both endoscope and instrument at the site of intervention. The setup changes the current routine of handling the endoscope. This study aims to determine if the platform allows effective and efficient manipulation to position the endoscope at potential intervention sites throughout the bowel. Five experts in flexible endoscopy first performed three colonoscopies on a computer simulator using the conventional angulation wheels. Next they trained with the joystick interface to achieve their personal level of intubation time with low pain score. 14 PhD students (novices) without hands-on experience performed the same colonoscopy case using either the conventional angulation wheels or joystick interface. Both novice groups trained to gain the average expert level. The cecal intubation time, pain score and visualization performance (% of bowel wall) were recorded. All experts reached their personal intubation time in 6 ± 6 sessions. Three experts completed their learning curve with low pain score in 8 ± 6 sessions. The novices required 11 ± 6 sessions using conventional angulation wheels, and 12 ± 6 sessions using the joystick interface. There was no difference in the visualization performance between the novice and between the expert groups. This study shows that the add-on platform enables endoscope manipulation required to perform colonoscopy. Experts need only a relatively short training period. Novices are as effective and as efficient in endoscope manipulation when comparing the add-on platform with conventional endoscope control.
可弯曲内镜越来越多地用于进行微创干预。一种新型附加平台允许在干预部位单人控制内镜和器械。这种设置改变了当前操作内镜的常规方式。本研究旨在确定该平台是否能有效地将内镜定位在整个肠道的潜在干预部位。五位可弯曲内镜专家首先在计算机模拟器上使用传统角度控制轮进行了三次结肠镜检查。接下来,他们使用操纵杆界面进行训练,以达到个人插管时间短且疼痛评分低的水平。14名没有实际操作经验的博士生(新手)使用传统角度控制轮或操纵杆界面进行了相同的结肠镜检查病例。两个新手组都进行训练以达到专家平均水平。记录了盲肠插管时间、疼痛评分和可视化表现(肠壁百分比)。所有专家在6±6次训练中达到了个人插管时间。三名专家在8±6次训练中以低疼痛评分完成了学习曲线。新手使用传统角度控制轮需要11±6次训练,使用操纵杆界面需要12±6次训练。新手组和专家组之间的可视化表现没有差异。本研究表明,附加平台能够实现进行结肠镜检查所需的内镜操作。专家仅需相对较短的训练期。与传统内镜控制相比,在使用附加平台时,新手在内镜操作方面同样有效且高效。