Zhou Xiaolong, Yu Hui, Liu Honghai, Li Youfu
College of Computer Science and Technology, Zhejiang University of Technology, Hangzhou 310023, China.
School of Computing, University of Portsmouth, Portsmouth PO1 3HE, UK.
Sensors (Basel). 2015 Dec 3;15(12):30240-60. doi: 10.3390/s151229794.
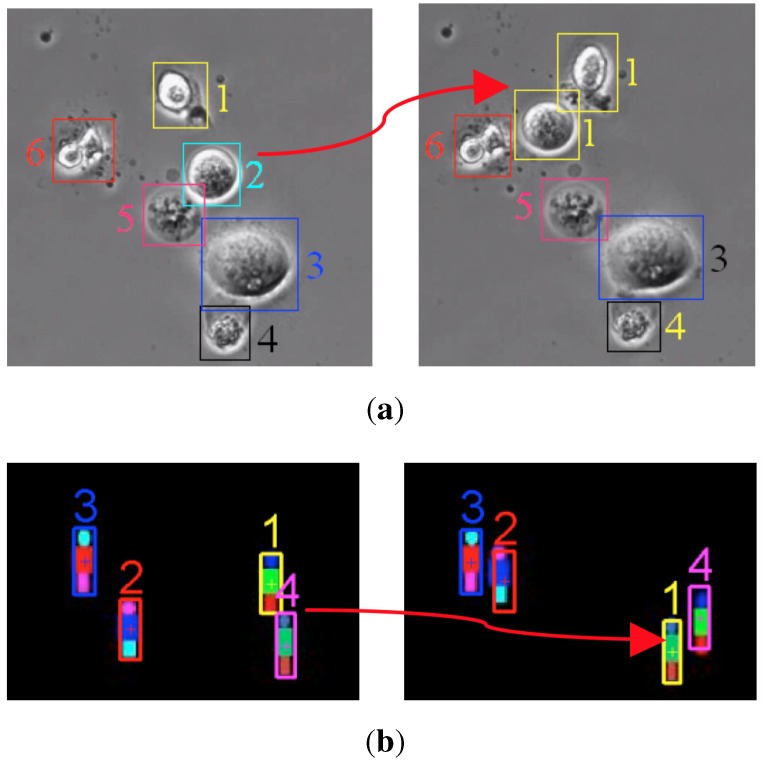
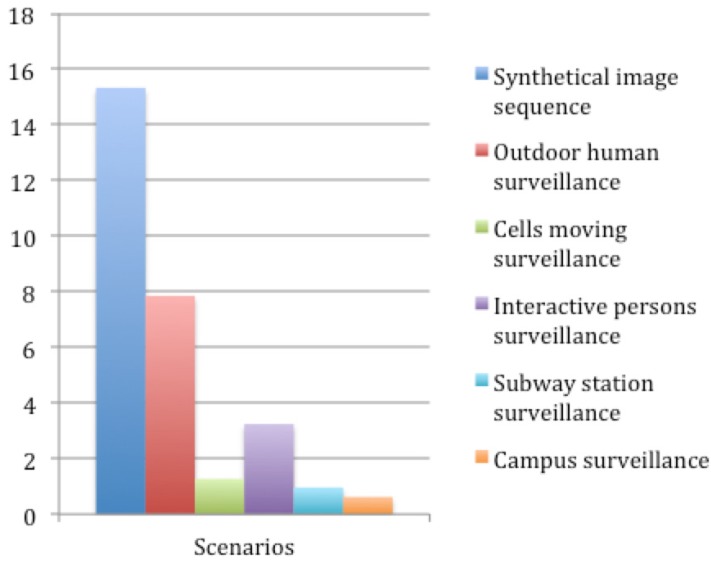
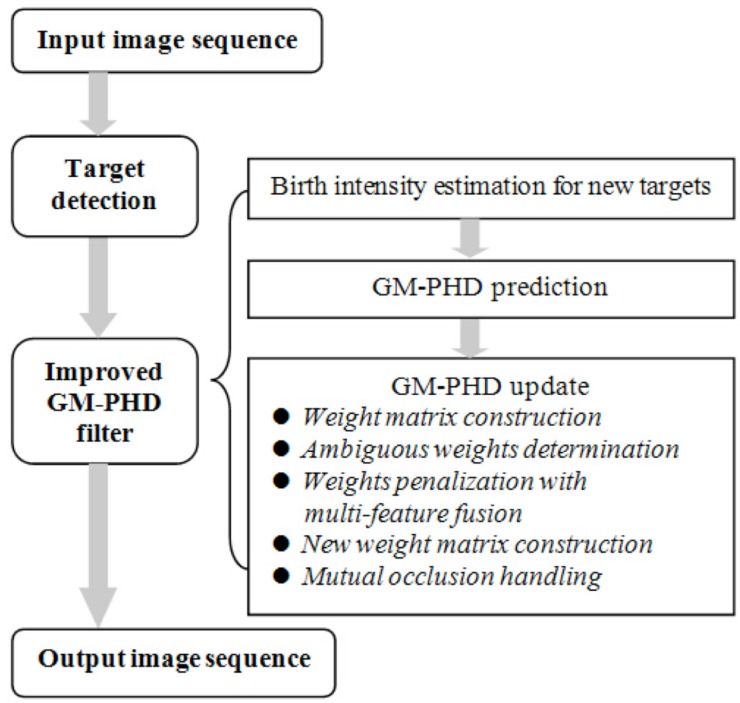
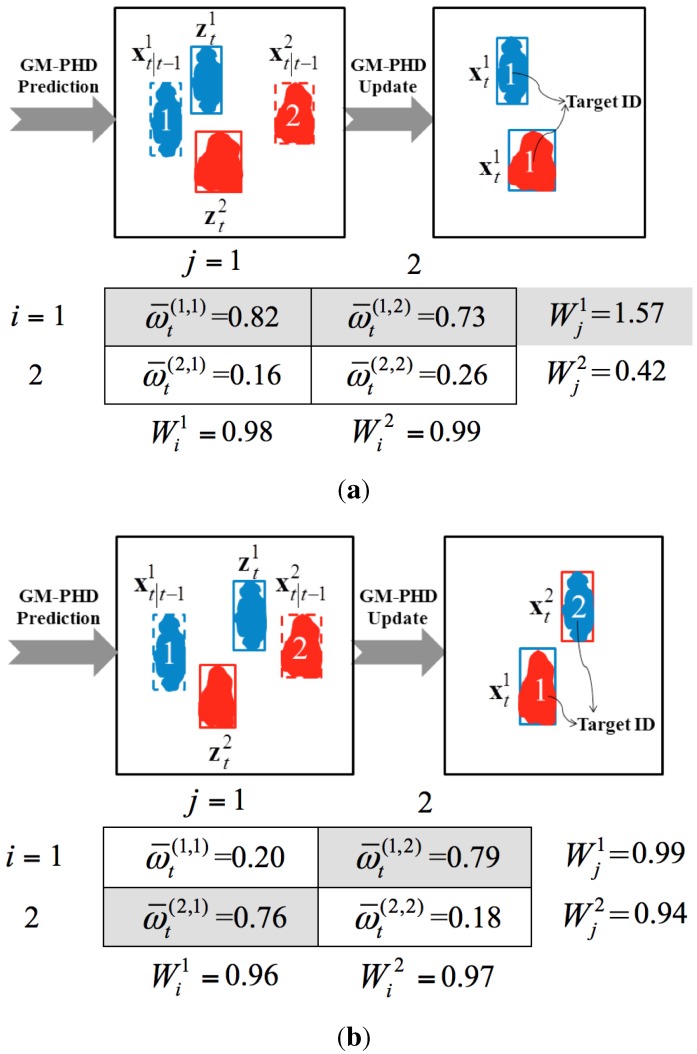
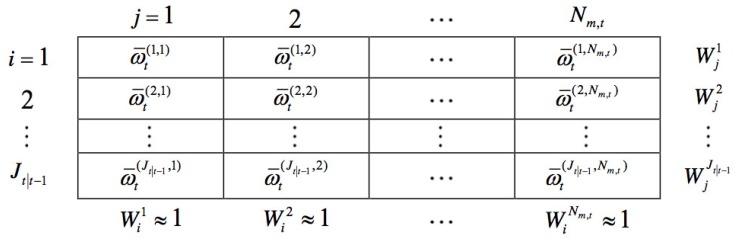
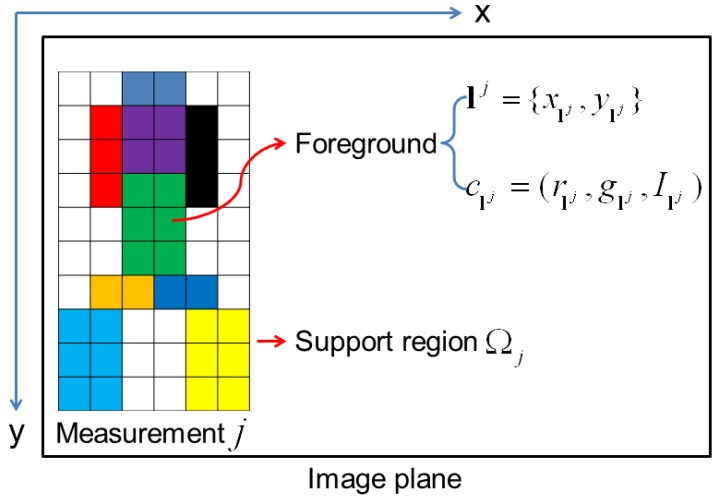
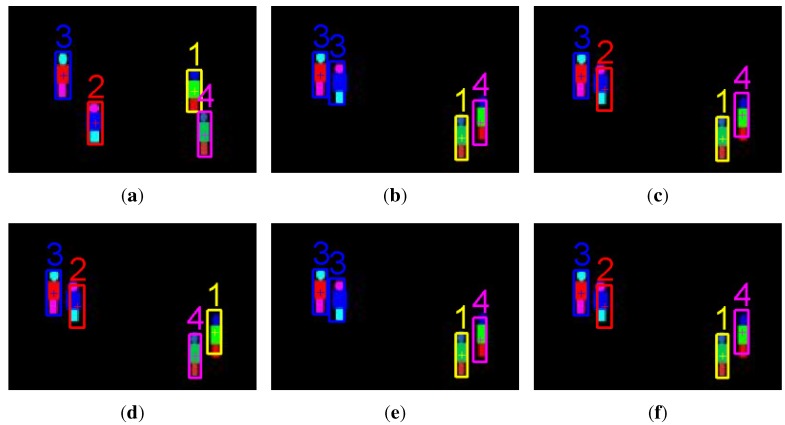
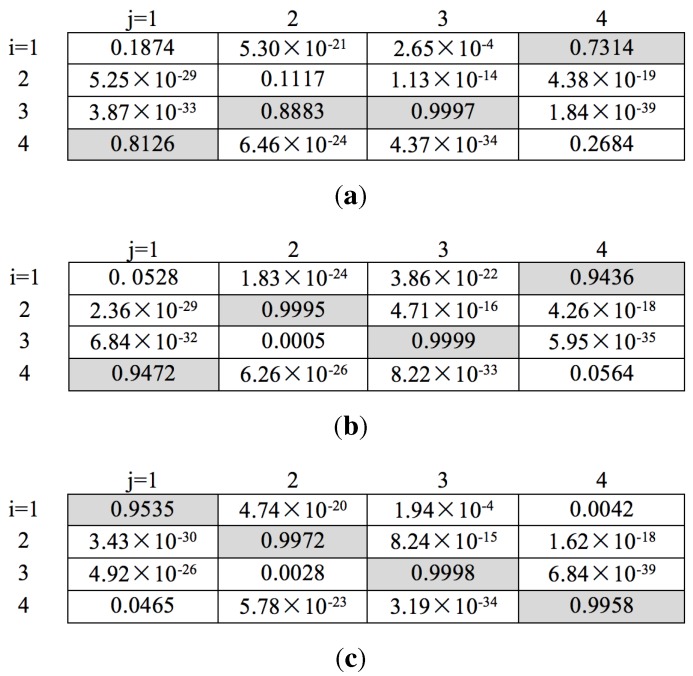
Tracking multiple moving targets from a video plays an important role in many vision-based robotic applications. In this paper, we propose an improved Gaussian mixture probability hypothesis density (GM-PHD) tracker with weight penalization to effectively and accurately track multiple moving targets from a video. First, an entropy-based birth intensity estimation method is incorporated to eliminate the false positives caused by noisy video data. Then, a weight-penalized method with multi-feature fusion is proposed to accurately track the targets in close movement. For targets without occlusion, a weight matrix that contains all updated weights between the predicted target states and the measurements is constructed, and a simple, but effective method based on total weight and predicted target state is proposed to search the ambiguous weights in the weight matrix. The ambiguous weights are then penalized according to the fused target features that include spatial-colour appearance, histogram of oriented gradient and target area and further re-normalized to form a new weight matrix. With this new weight matrix, the tracker can correctly track the targets in close movement without occlusion. For targets with occlusion, a robust game-theoretical method is used. Finally, the experiments conducted on various video scenarios validate the effectiveness of the proposed penalization method and show the superior performance of our tracker over the state of the art.
从视频中跟踪多个移动目标在许多基于视觉的机器人应用中起着重要作用。在本文中,我们提出了一种带有权重惩罚的改进高斯混合概率假设密度(GM-PHD)跟踪器,以有效且准确地从视频中跟踪多个移动目标。首先,引入一种基于熵的出生强度估计方法,以消除由噪声视频数据引起的误报。然后,提出一种具有多特征融合的权重惩罚方法,以精确跟踪近距离移动的目标。对于无遮挡的目标,构建一个包含预测目标状态与测量值之间所有更新权重的权重矩阵,并提出一种基于总权重和预测目标状态的简单但有效的方法,在权重矩阵中搜索模糊权重。然后根据融合的目标特征(包括空间颜色外观、方向梯度直方图和目标面积)对模糊权重进行惩罚,并进一步重新归一化以形成新的权重矩阵。利用这个新的权重矩阵,跟踪器可以正确跟踪近距离移动且无遮挡的目标。对于有遮挡的目标,使用一种鲁棒的博弈论方法。最后,在各种视频场景下进行的实验验证了所提出惩罚方法的有效性,并表明我们的跟踪器优于现有技术。