Luo Lufeng, Tang Yunchao, Zou Xiangjun, Wang Chenglin, Zhang Po, Feng Wenxian
Key Laboratory of Key Technology on Agricultural Machine and Equipment, Ministry of Education, South China Agricultural University, Guangzhou 510642, China.
College of Mechanical Engineering, Tianjin University of Technology and Education, Tianjin 300222, China.
Sensors (Basel). 2016 Dec 10;16(12):2098. doi: 10.3390/s16122098.
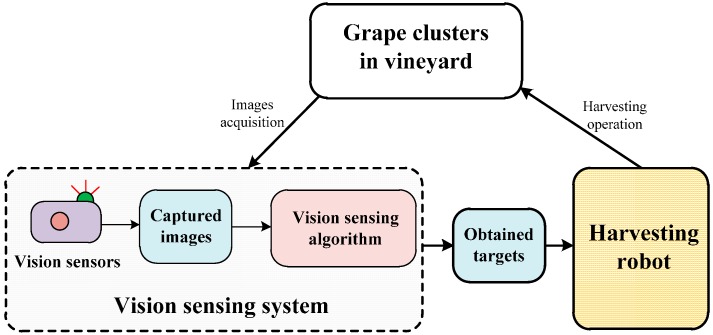
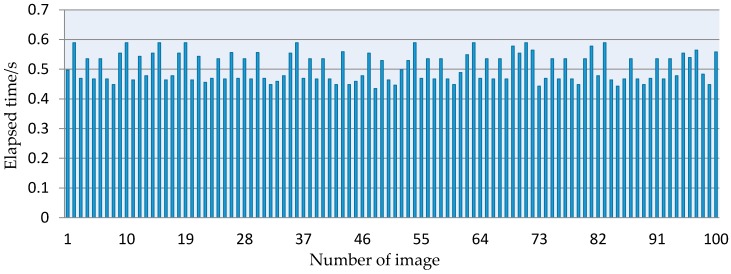
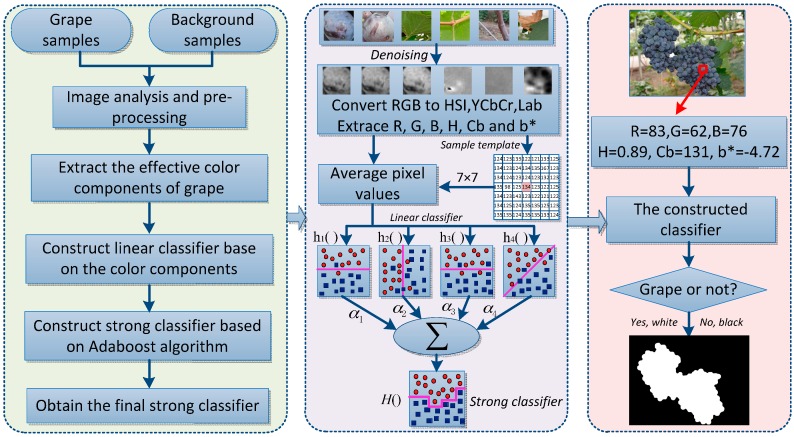
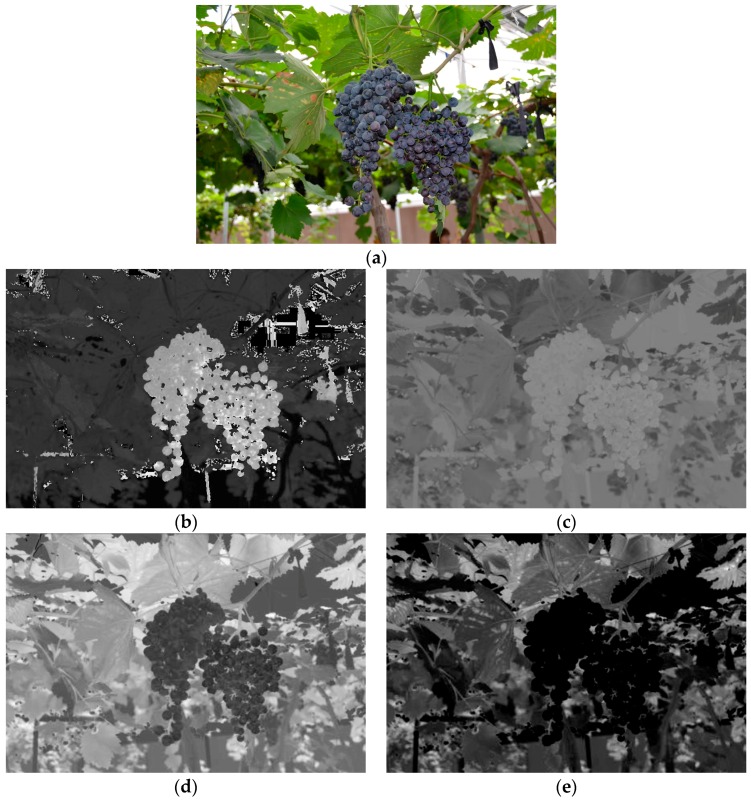
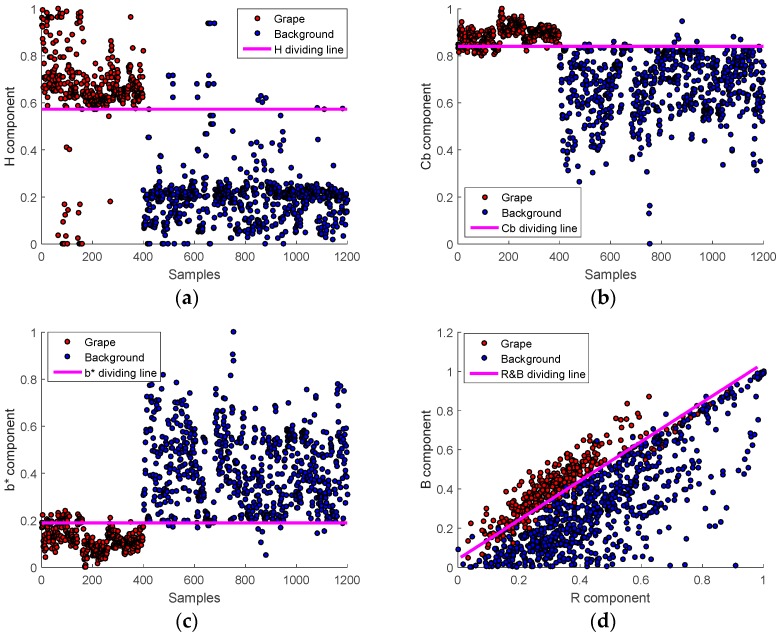
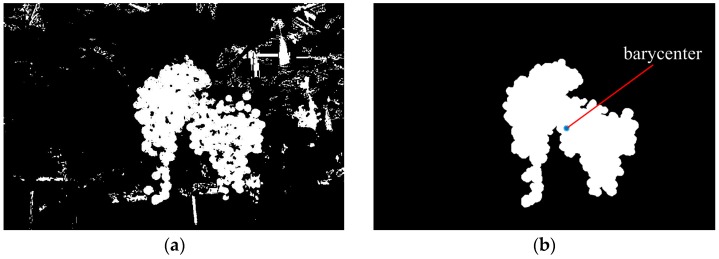
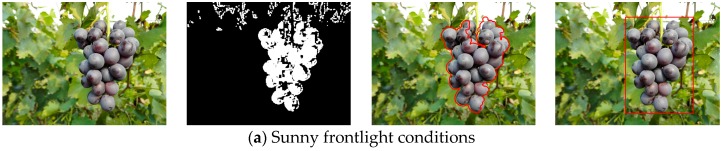
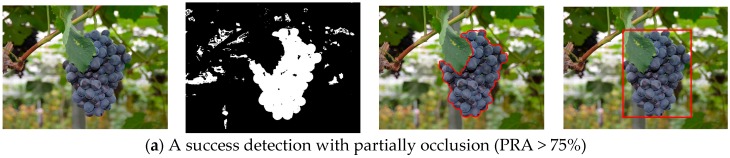
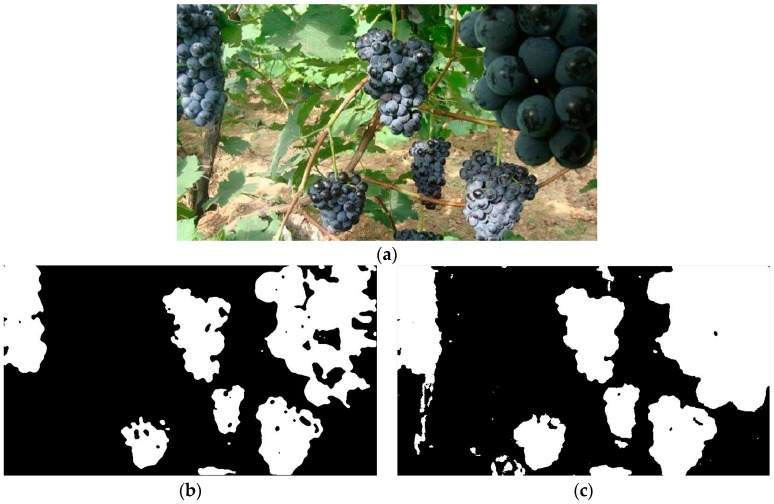
The automatic fruit detection and precision picking in unstructured environments was always a difficult and frontline problem in the harvesting robots field. To realize the accurate identification of grape clusters in a vineyard, an approach for the automatic detection of ripe grape by combining the AdaBoost framework and multiple color components was developed by using a simple vision sensor. This approach mainly included three steps: (1) the dataset of classifier training samples was obtained by capturing the images from grape planting scenes using a color digital camera, extracting the effective color components for grape clusters, and then constructing the corresponding linear classification models using the threshold method; (2) based on these linear models and the dataset, a strong classifier was constructed by using the AdaBoost framework; and (3) all the pixels of the captured images were classified by the strong classifier, the noise was eliminated by the region threshold method and morphological filtering, and the grape clusters were finally marked using the enclosing rectangle method. Nine hundred testing samples were used to verify the constructed strong classifier, and the classification accuracy reached up to 96.56%, higher than other linear classification models. Moreover, 200 images captured under three different illuminations in the vineyard were selected as the testing images on which the proposed approach was applied, and the average detection rate was as high as 93.74%. The experimental results show that the approach can partly restrain the influence of the complex background such as the weather condition, leaves and changing illumination.
在非结构化环境中的水果自动检测与精准采摘一直是收获机器人领域的一个难题和前沿问题。为了实现葡萄园葡萄串的准确识别,利用一个简单的视觉传感器,开发了一种结合AdaBoost框架和多种颜色分量的成熟葡萄自动检测方法。该方法主要包括三个步骤:(1)通过使用彩色数码相机从葡萄种植场景中采集图像,提取葡萄串的有效颜色分量,然后使用阈值方法构建相应的线性分类模型,从而获得分类器训练样本数据集;(2)基于这些线性模型和数据集,使用AdaBoost框架构建一个强分类器;(3)用强分类器对采集图像的所有像素进行分类,通过区域阈值方法和形态学滤波消除噪声,最后用矩形框方法标记葡萄串。使用900个测试样本对构建的强分类器进行验证,分类准确率高达96.56%,高于其他线性分类模型。此外,选取葡萄园在三种不同光照条件下采集的200幅图像作为测试图像,应用所提方法,平均检测率高达93.74%。实验结果表明,该方法能够部分抑制天气条件、树叶和光照变化等复杂背景的影响。