Rutkowski Tomasz M
BCI-Lab Tokyo, Japan.
Front Neurorobot. 2016 Dec 6;10:20. doi: 10.3389/fnbot.2016.00020. eCollection 2016.
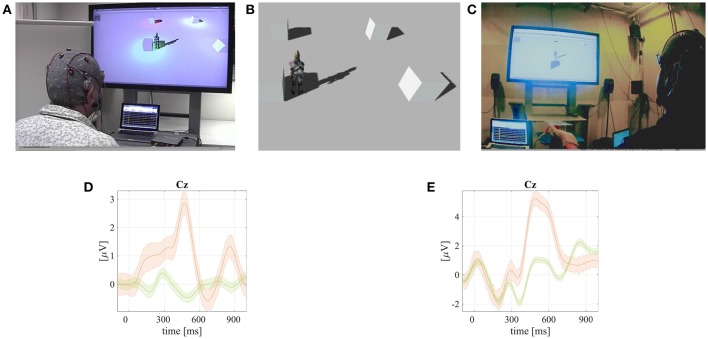
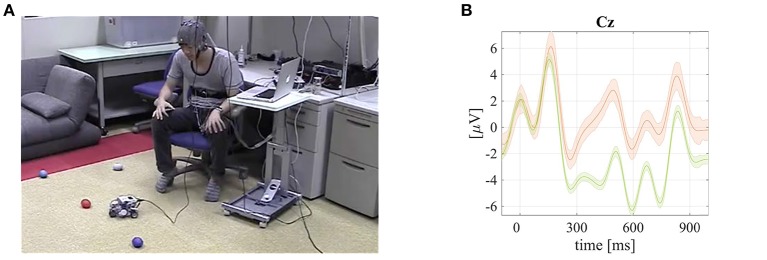
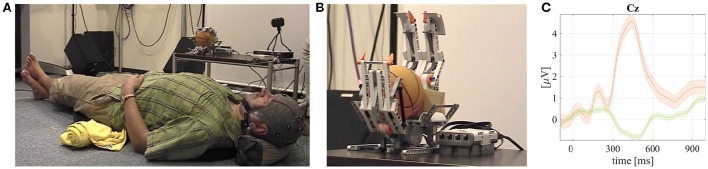
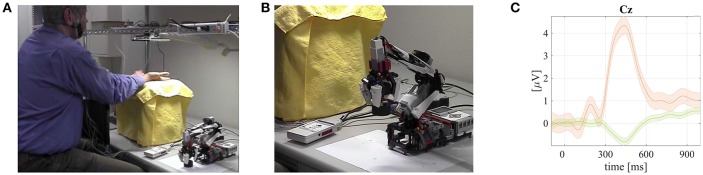
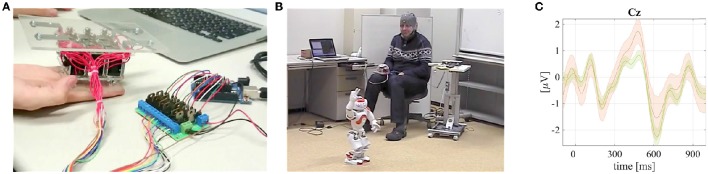
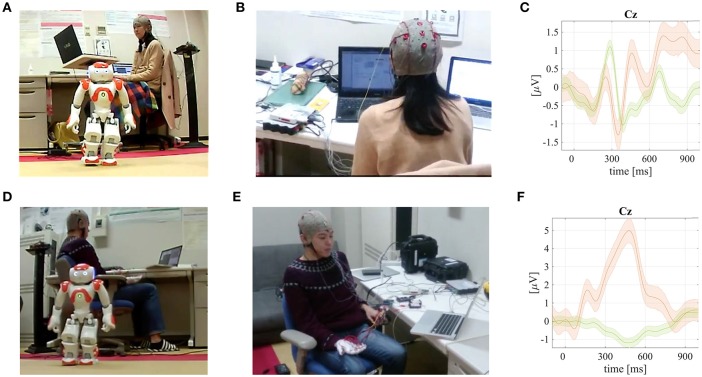
The paper reviews nine robotic and virtual reality (VR) brain-computer interface (BCI) projects developed by the author, in collaboration with his graduate students, within the BCI-lab research group during its association with University of Tsukuba, Japan. The nine novel approaches are discussed in applications to direct brain-robot and brain-virtual-reality-agent control interfaces using tactile and auditory BCI technologies. The BCI user intentions are decoded from the brainwaves in realtime using a non-invasive electroencephalography (EEG) and they are translated to a symbiotic robot or virtual reality agent thought-based only control. A communication protocol between the BCI output and the robot or the virtual environment is realized in a symbiotic communication scenario using an user datagram protocol (UDP), which constitutes an internet of things (IoT) control scenario. Results obtained from healthy users reproducing simple brain-robot and brain-virtual-agent control tasks in online experiments support the research goal of a possibility to interact with robotic devices and virtual reality agents using symbiotic thought-based BCI technologies. An offline BCI classification accuracy boosting method, using a previously proposed information geometry derived approach, is also discussed in order to further support the reviewed robotic and virtual reality thought-based control paradigms.
本文回顾了作者与其研究生在脑机接口实验室研究团队与日本筑波大学合作期间开发的九个机器人和虚拟现实(VR)脑机接口(BCI)项目。文中讨论了这九种新颖方法在使用触觉和听觉BCI技术的直接脑机-机器人和脑机-虚拟现实智能体控制接口中的应用。利用非侵入式脑电图(EEG)实时从脑电波中解码BCI用户意图,并将其转换为仅基于思维的共生机器人或虚拟现实智能体控制。在共生通信场景中,使用用户数据报协议(UDP)实现BCI输出与机器人或虚拟环境之间的通信协议,这构成了物联网(IoT)控制场景。健康用户在在线实验中重现简单脑机-机器人和脑机-虚拟智能体控制任务所获得的结果,支持了使用基于共生思维的BCI技术与机器人设备和虚拟现实智能体进行交互的研究目标。为了进一步支持所回顾的基于机器人和虚拟现实思维的控制范式,还讨论了一种使用先前提出的基于信息几何推导方法的离线BCI分类准确率提升方法。