Kijima Akifumi, Shima Hiroyuki, Okumura Motoki, Yamamoto Yuji, Richardson Michael J
Department of Education, University of Yamanashi Kofu, Japan.
Department of Environmental Sciences, University of Yamanashi Kofu, Japan.
Front Psychol. 2017 Feb 2;8:3. doi: 10.3389/fpsyg.2017.00003. eCollection 2017.
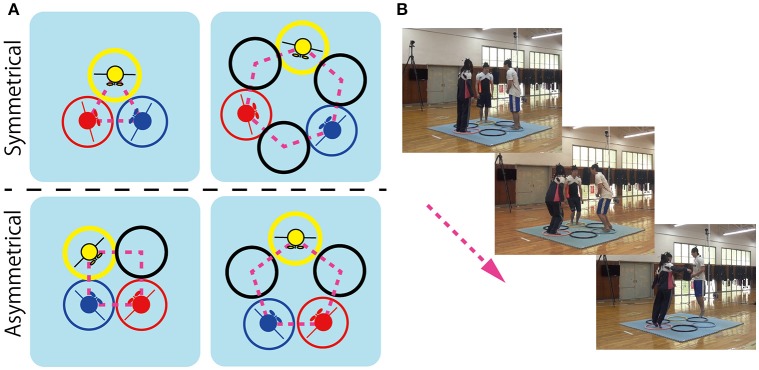
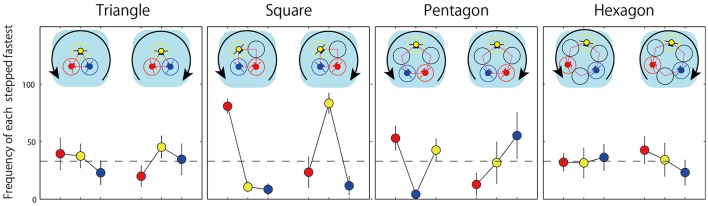
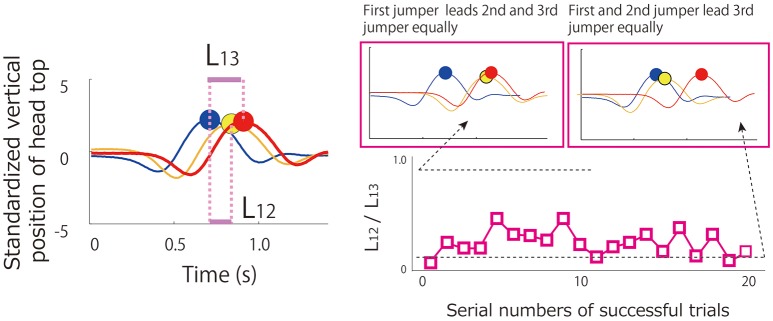
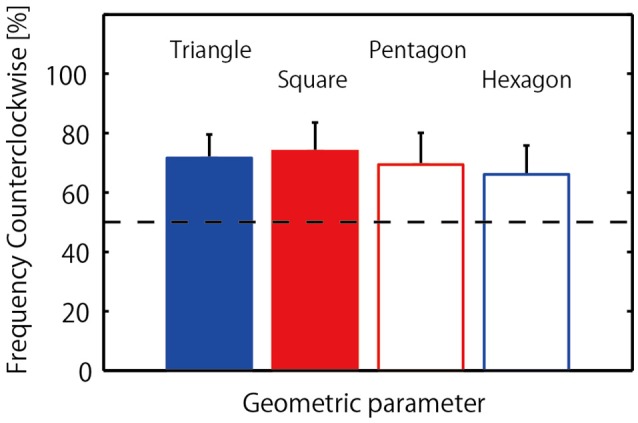
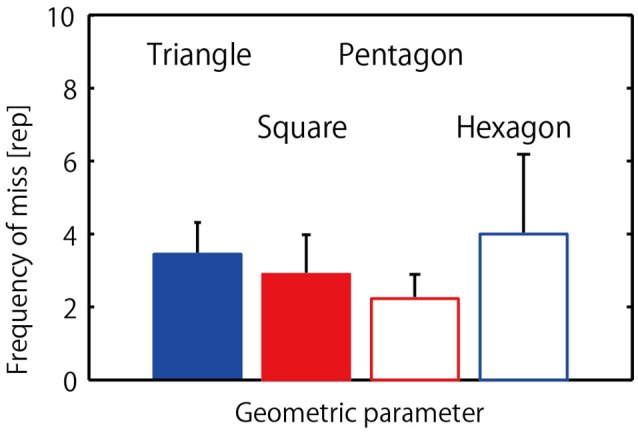
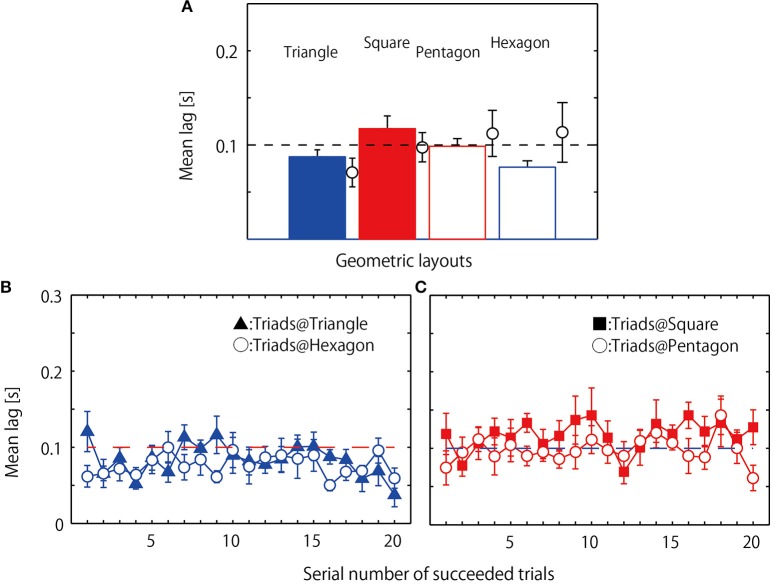
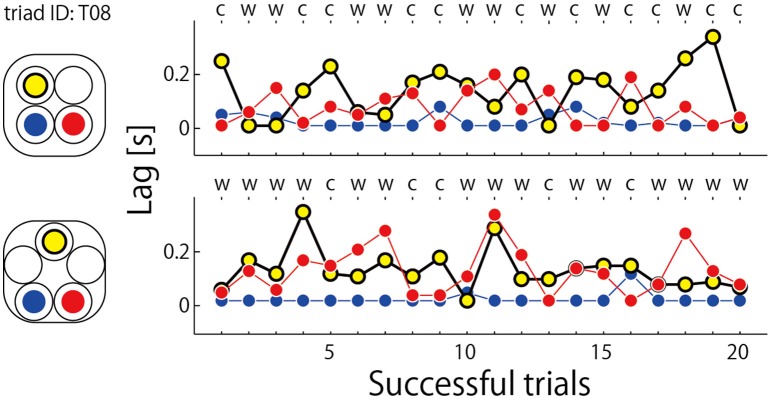
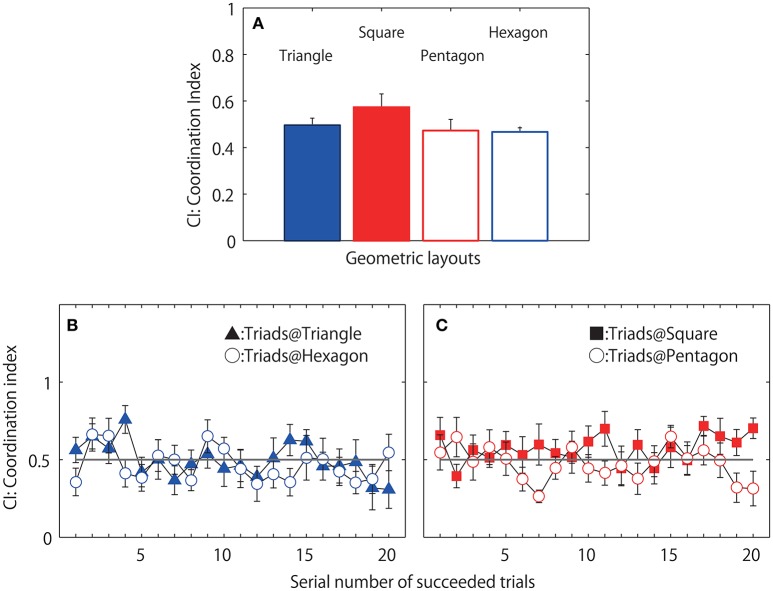
We investigated whether the patterns of coordination that emerged during a three-participant (triadic) jumping task were defined by the symmetries of the (multi) agent-environment task space. Triads were instructed to jump around different geometrical arrangements of hoops. The symmetry of the hoop geometry was manipulated to create two symmetrical and two asymmetrical participant-hoop configurations. Video and motion tracking recordings were employed to determine the frequencies of coordination misses (collisions or failed jumps) and during 20 successful jump sequences, the jump direction chosen (clockwise vs. counterclockwise) and the patterning of between participant temporal movement lags within and across jump events. The results revealed that the (a)symmetry of the joint action workspace significantly influenced the (a)symmetry of the jump direction dynamics and, more importantly, the (a)symmetry of the between participant coordination lags. The symmetrical participant-hoop configurations resulted in smaller overall movement lags and a more spontaneous, interchangeable leader/follower relationship between participants, whereas the asymmetrical participant-hoop configurations resulted in slightly larger overall movements lags and a more explicit, persistent asymmetry in the leader/follower relationship of participants. The degree to which the patterns of behavioral coordination that emerged were consistent with the theory of symmetry groups and spontaneous and explicit symmetry-breaking are discussed.
我们研究了在三人跳跃任务中出现的协调模式是否由(多)主体-环境任务空间的对称性所定义。三人组被要求围绕不同几何排列的箍进行跳跃。通过操纵箍的几何对称性来创建两种对称和两种不对称的参与者-箍配置。采用视频和运动跟踪记录来确定协调失误(碰撞或跳跃失败)的频率,以及在20个成功的跳跃序列中,所选择的跳跃方向(顺时针与逆时针)以及跳跃事件内和跨跳跃事件的参与者间时间运动滞后模式。结果表明,联合行动工作空间的(非)对称性显著影响了跳跃方向动态的(非)对称性,更重要的是,影响了参与者间协调滞后的(非)对称性。对称的参与者-箍配置导致总体运动滞后较小,参与者之间的领导者/跟随者关系更自发、可互换,而非对称的参与者-箍配置导致总体运动滞后稍大,参与者的领导者/跟随者关系存在更明显、持续的不对称性。文中讨论了所出现的行为协调模式与对称群理论以及自发和显式对称破缺相一致的程度。