Schwarz Olivia, Bohra Ali Asgar, Liu Xinyu, Reichert Heinrich, VijayRaghavan Krishnaswamy, Pielage Jan
Friedrich Miescher Institute for Biomedical Research, Basel, Switzerland.
Biozentrum University of Basel, Basel, Switzerland.
Elife. 2017 Feb 17;6:e19892. doi: 10.7554/eLife.19892.
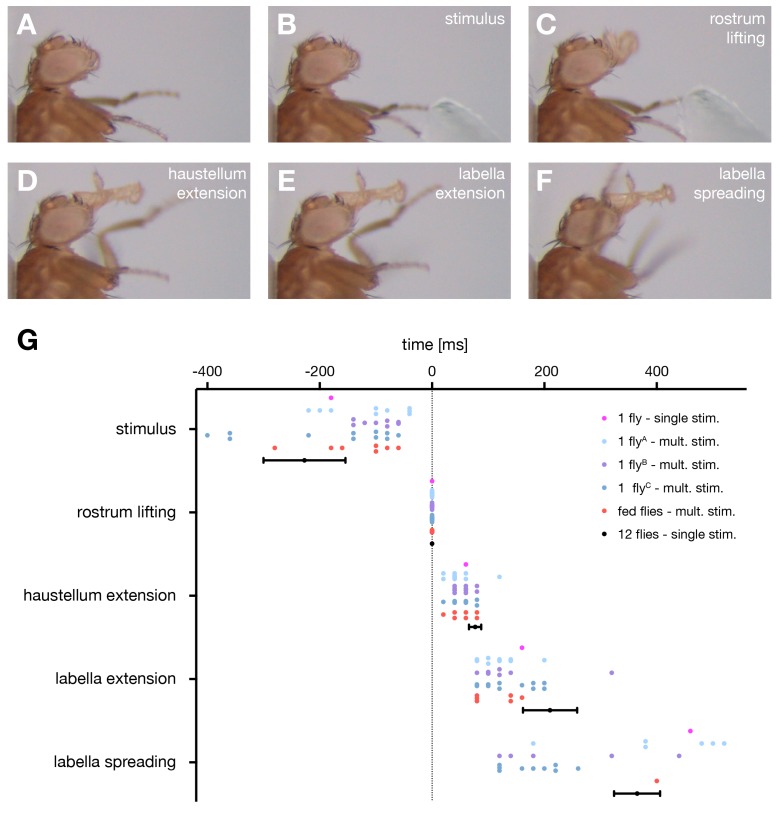
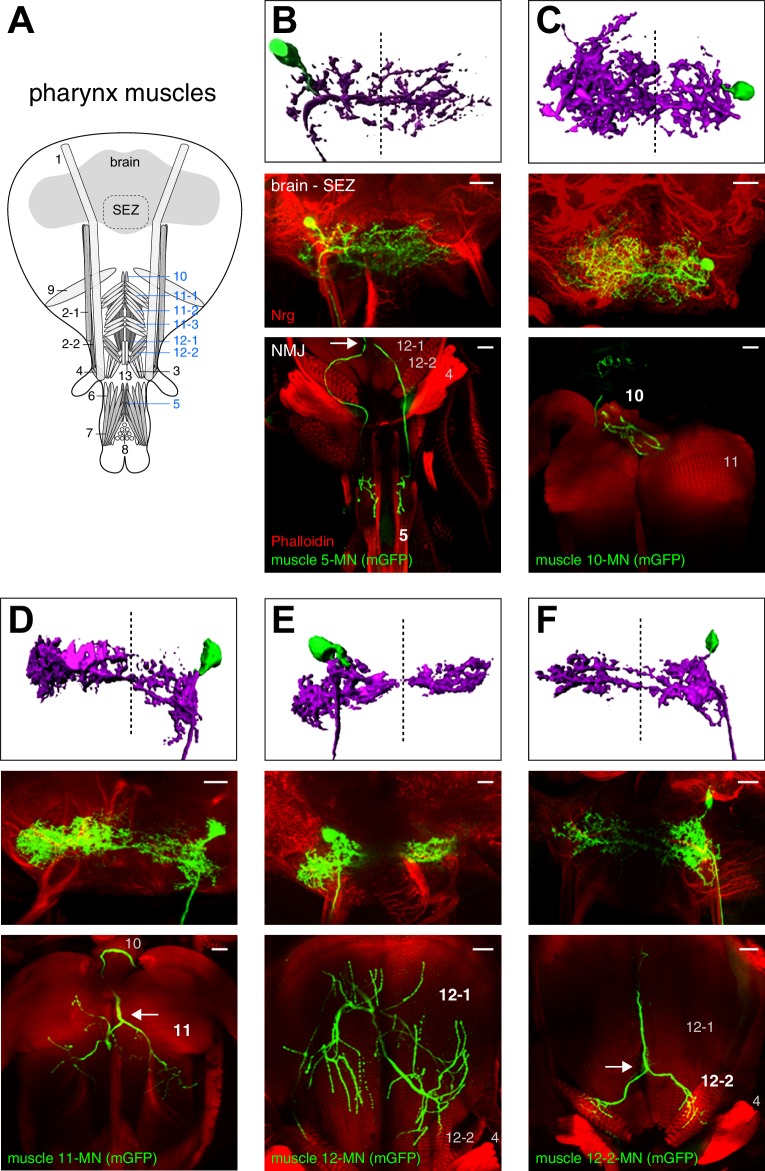
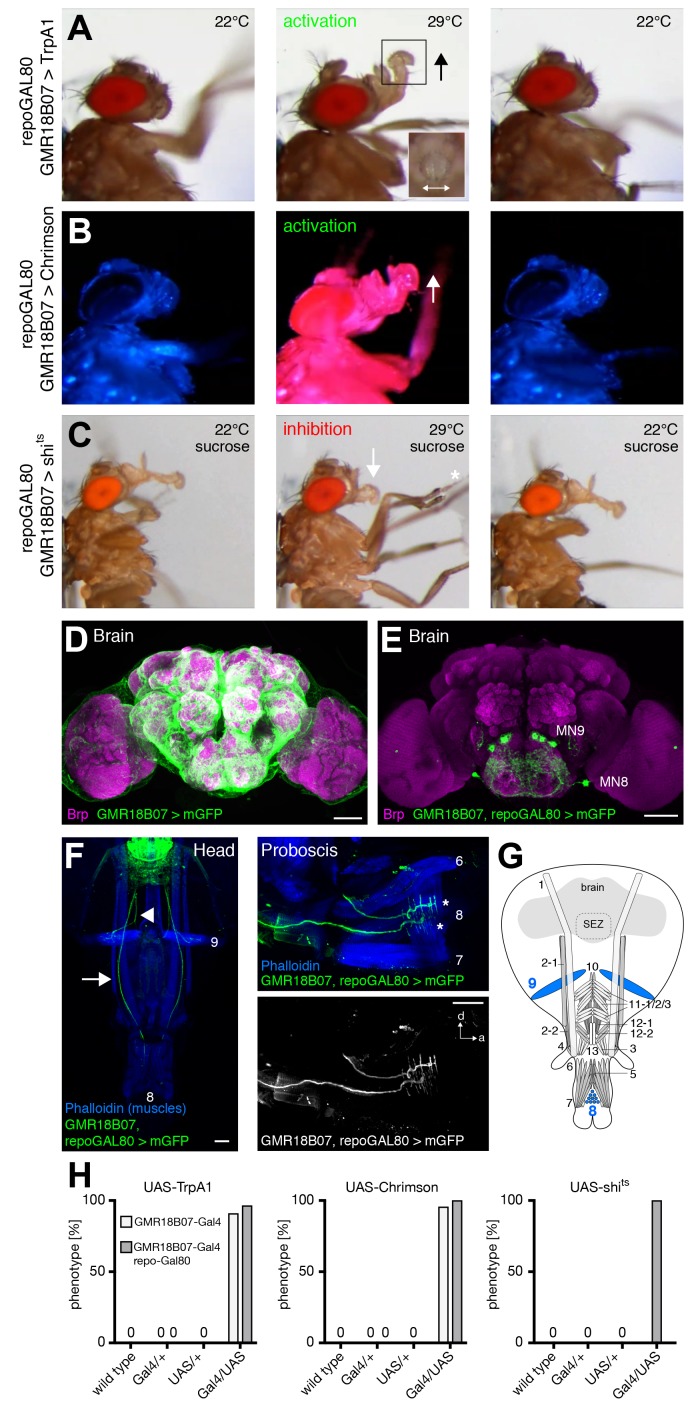
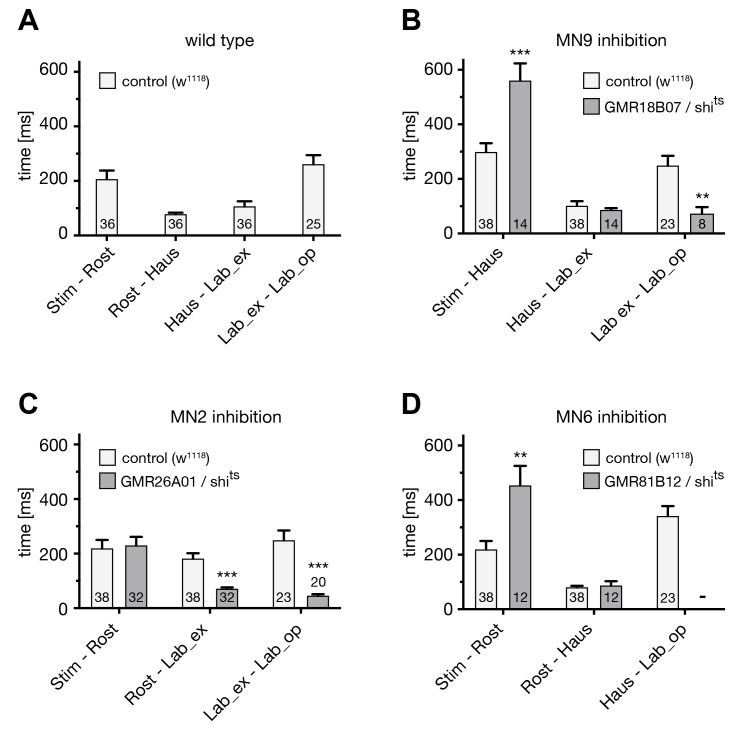
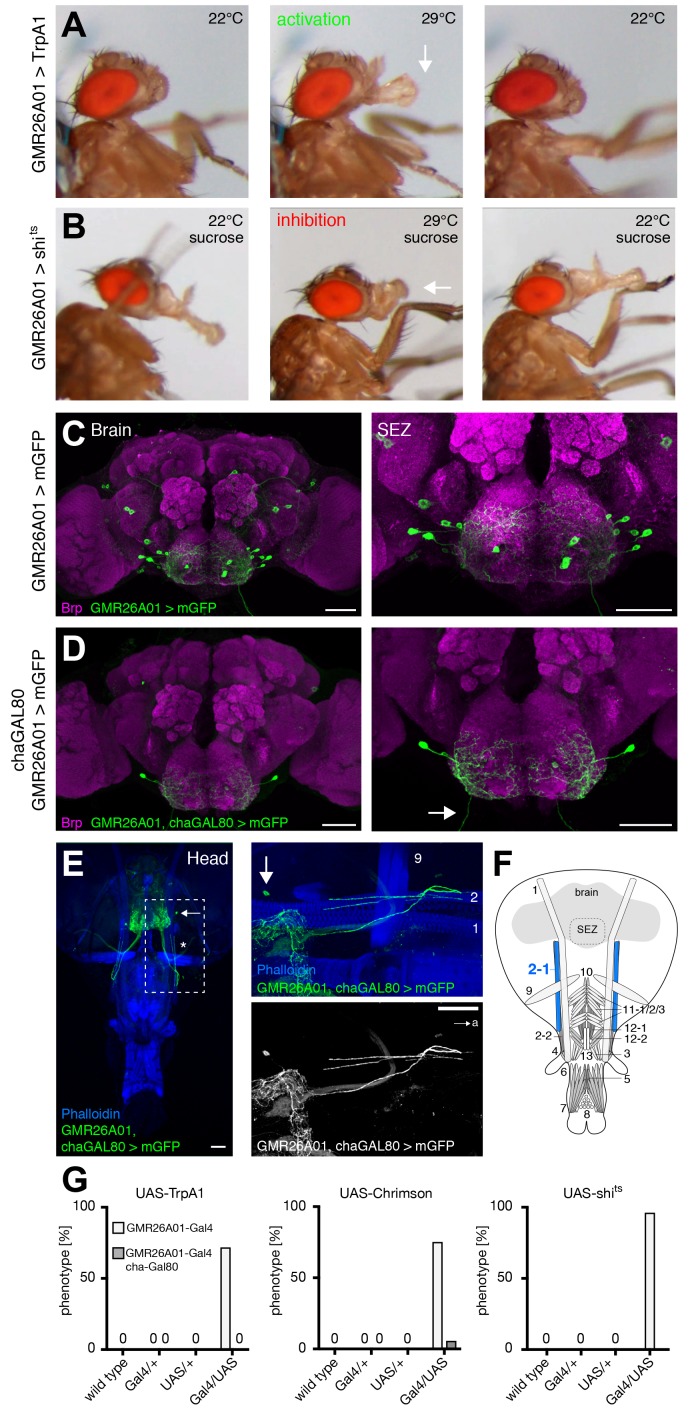
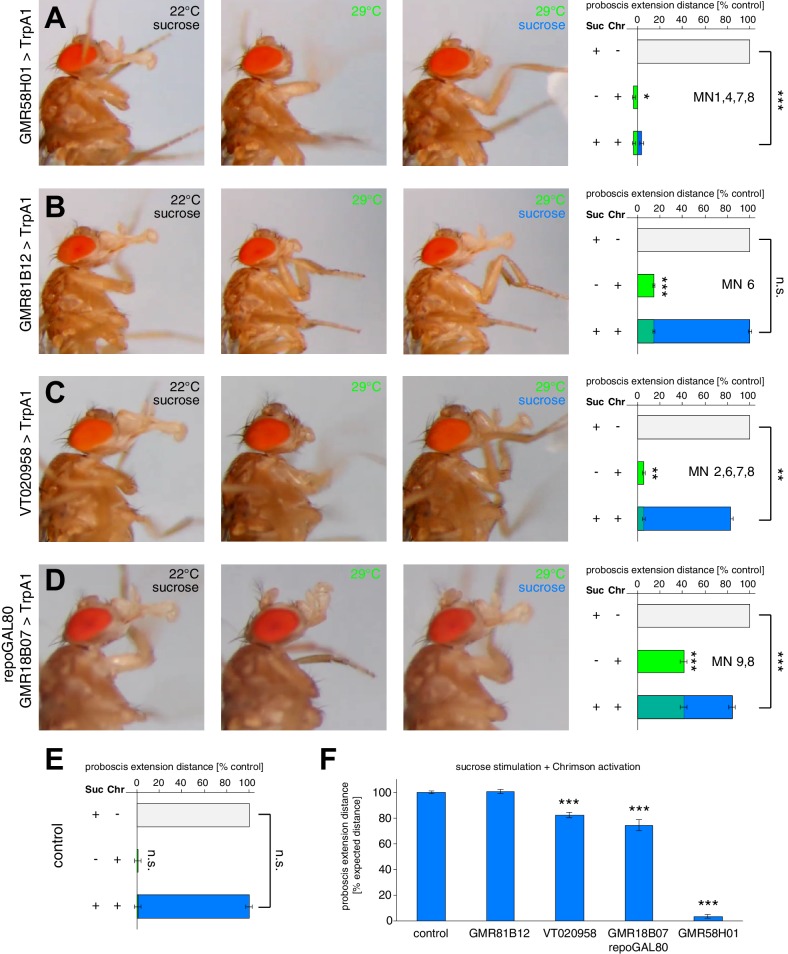
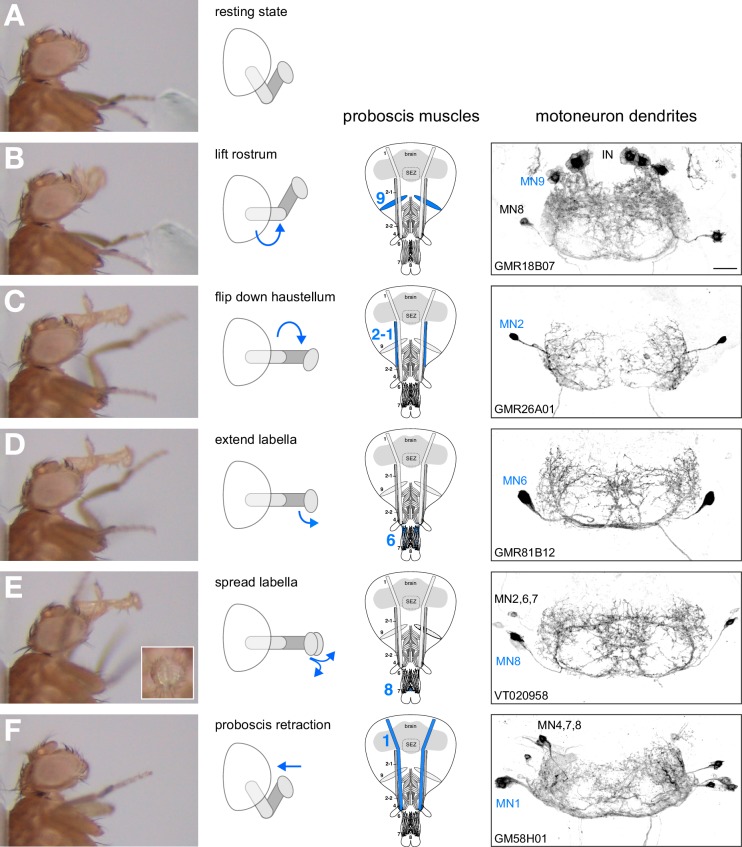
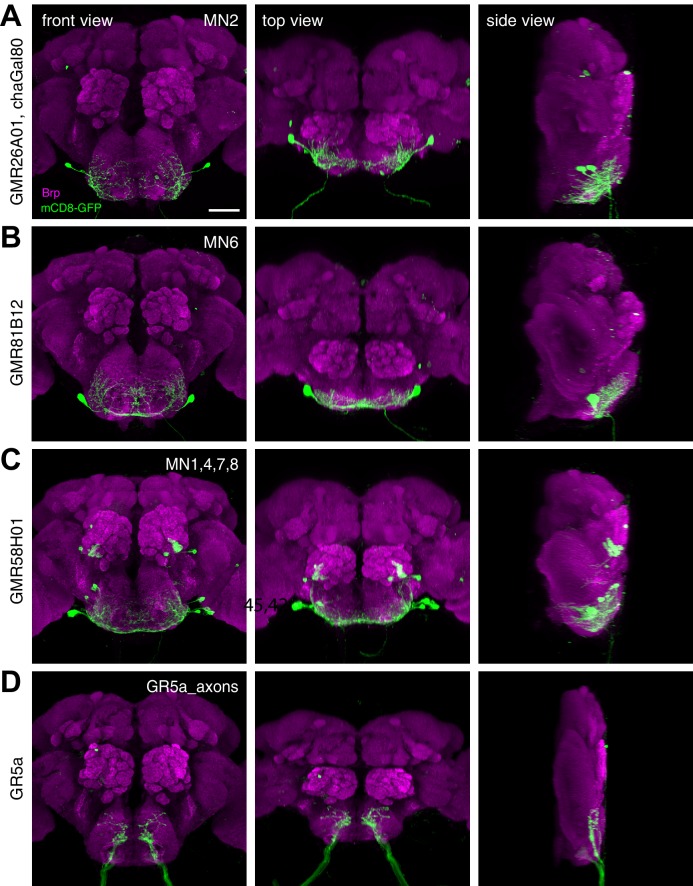
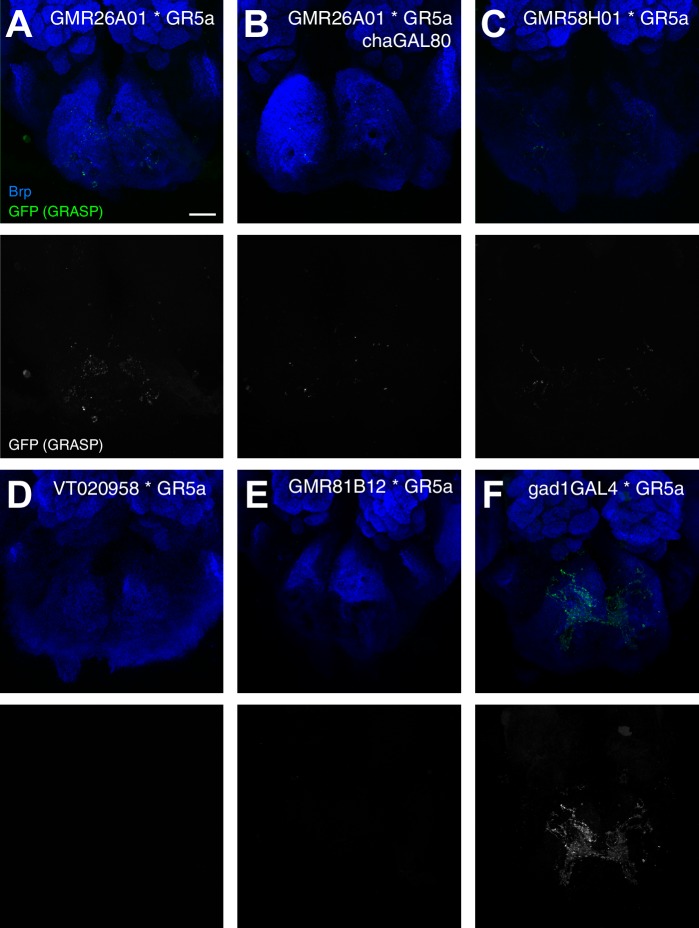
The precise coordination of body parts is essential for survival and behavior of higher organisms. While progress has been made towards the identification of central mechanisms coordinating limb movement, only limited knowledge exists regarding the generation and execution of sequential motor action patterns at the level of individual motoneurons. Here we use Drosophila proboscis extension as a model system for a reaching-like behavior. We first provide a neuroanatomical description of the motoneurons and muscles contributing to proboscis motion. Using genetic targeting in combination with artificial activation and silencing assays we identify the individual motoneurons controlling the five major sequential steps of proboscis extension and retraction. Activity-manipulations during naturally evoked proboscis extension show that orchestration of serial motoneuron activation does not rely on feed-forward mechanisms. Our data support a model in which central command circuits recruit individual motoneurons to generate task-specific proboscis extension sequences.
身体各部分的精确协调对于高等生物的生存和行为至关重要。虽然在确定协调肢体运动的中枢机制方面已取得进展,但关于单个运动神经元水平上连续运动动作模式的产生和执行,我们所知有限。在这里,我们使用果蝇伸吻作为一种类似伸手行为的模型系统。我们首先对参与吻运动的运动神经元和肌肉进行神经解剖学描述。通过结合基因靶向与人工激活和沉默试验,我们确定了控制吻伸和缩五个主要连续步骤的单个运动神经元。在自然诱发的吻伸展过程中的活动操纵表明,系列运动神经元激活的编排不依赖于前馈机制。我们的数据支持这样一个模型,即中枢指令回路招募单个运动神经元来生成特定任务的吻伸展序列。