Marchenko Olena O, Das Sulagna, Yu Ji, Novak Igor L, Rodionov Vladimir I, Efimova Nadia, Svitkina Tatyana, Wolgemuth Charles W, Loew Leslie M
R. D. Berlin Center for Cell Analysis and Modeling, University of Connecticut Health Center, Farmington, CT 06030.
Department of Anatomy and Structural Biology, Albert Einstein College of Medicine, New York, NY 10461.
Mol Biol Cell. 2017 Apr 15;28(8):1021-1033. doi: 10.1091/mbc.E16-06-0461. Epub 2017 Feb 22.
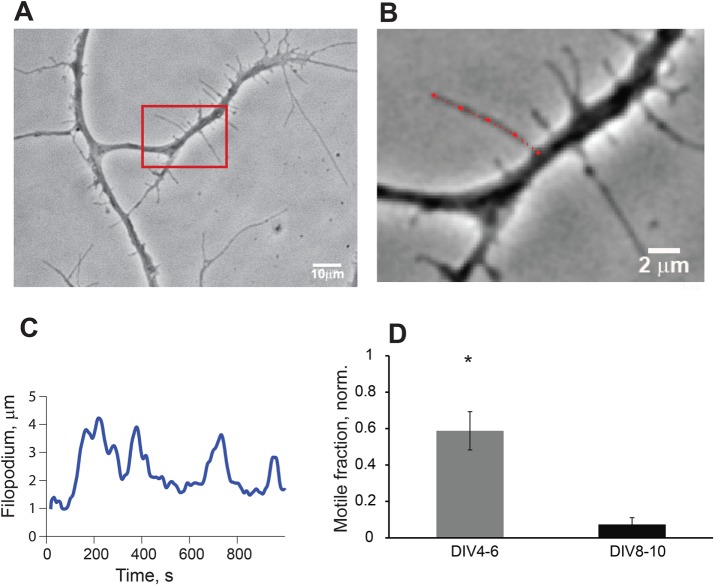
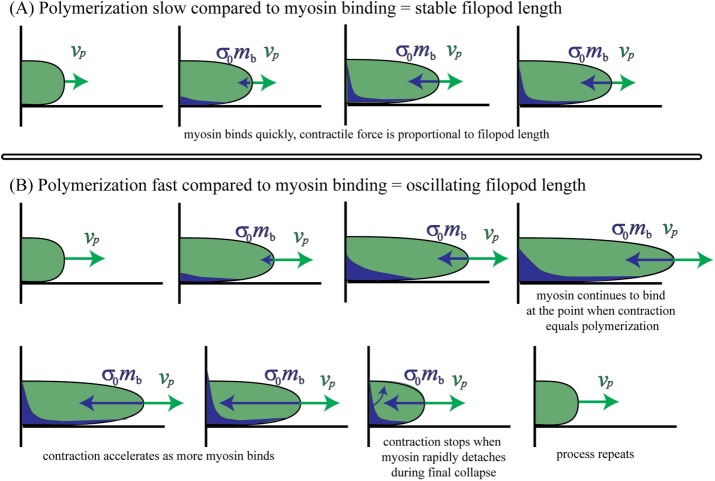
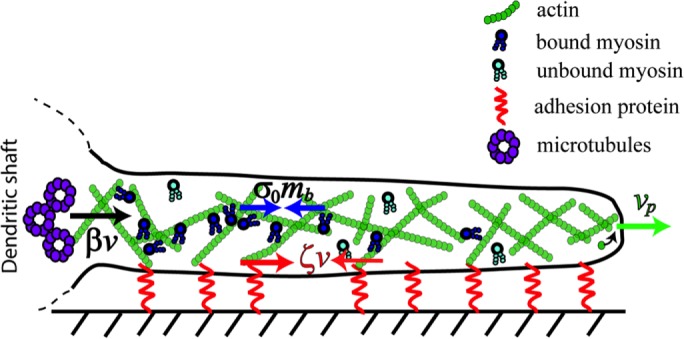
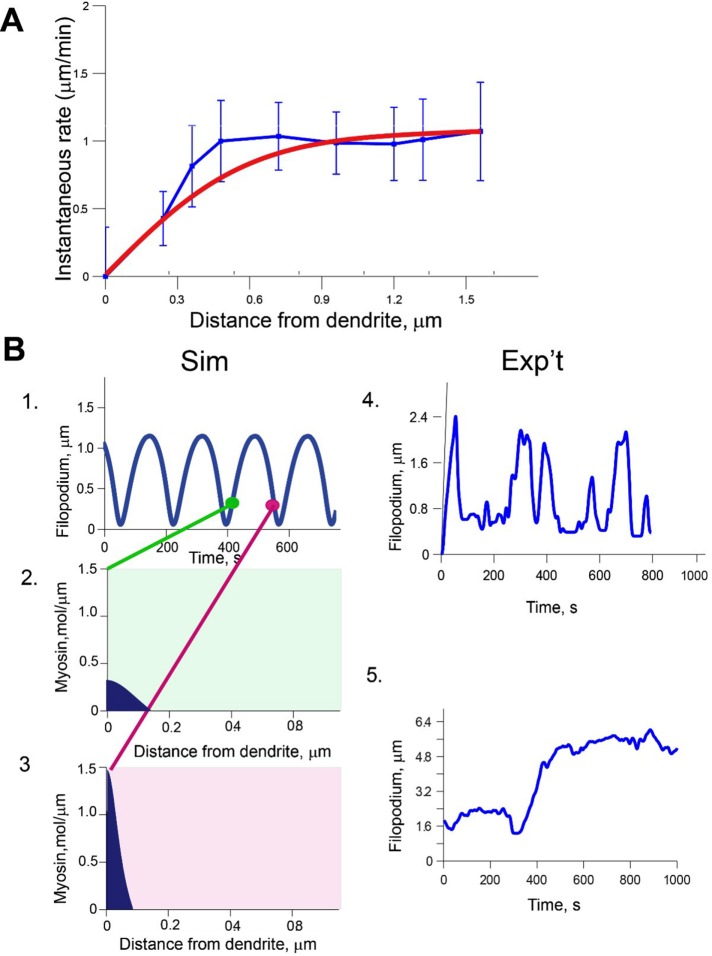
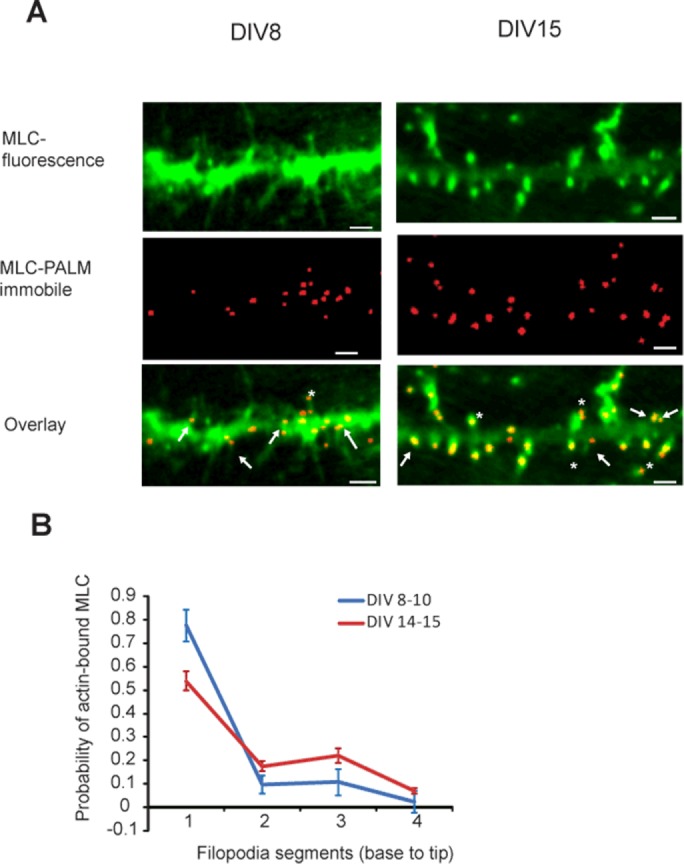
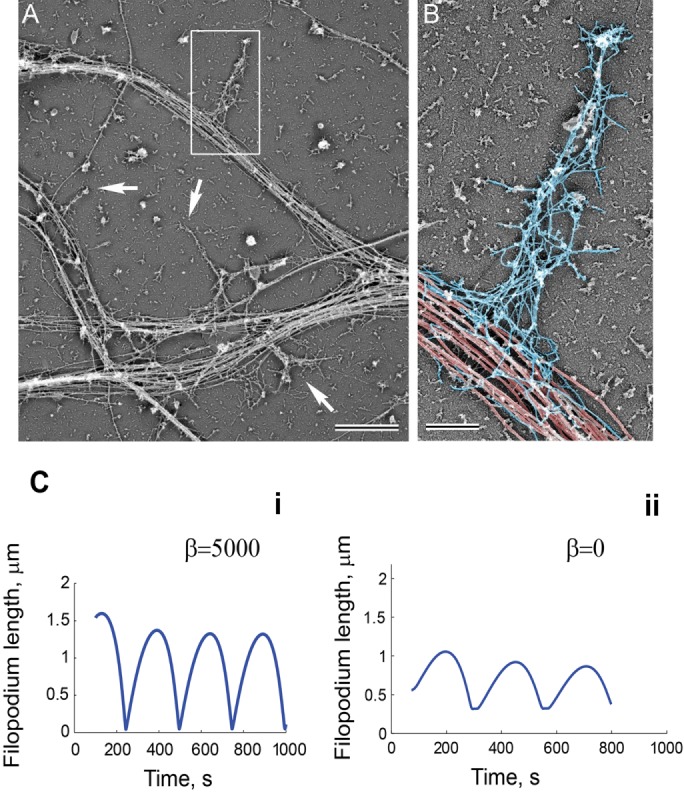
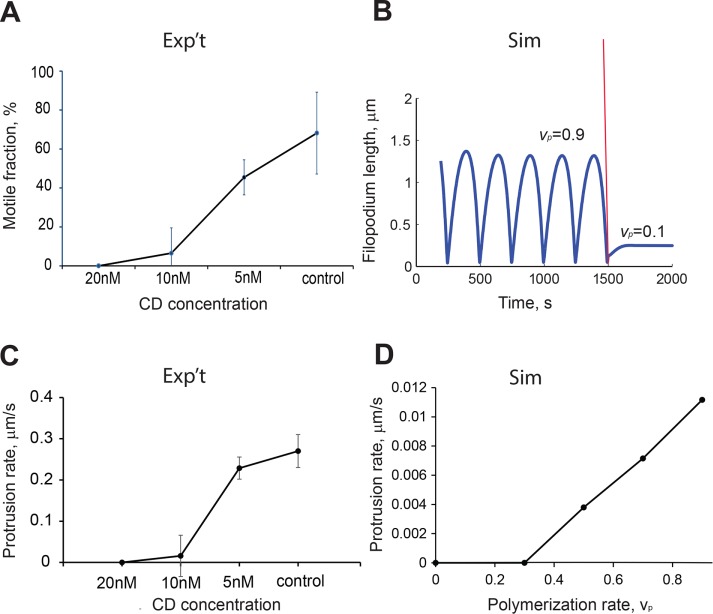
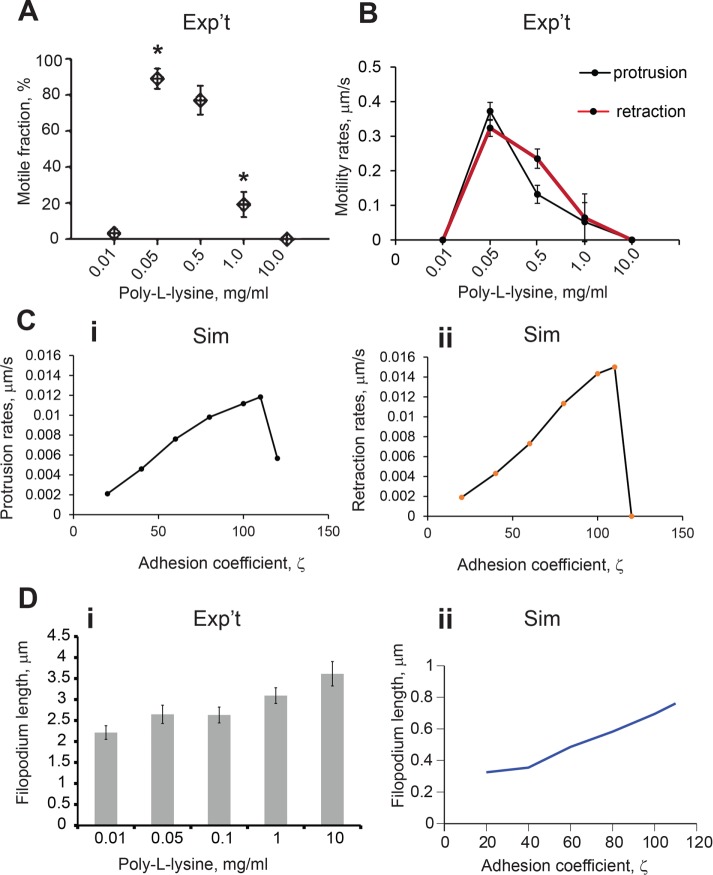
Dendritic filopodia are actin-filled dynamic subcellular structures that sprout on neuronal dendrites during neurogenesis. The exploratory motion of the filopodia is crucial for synaptogenesis, but the underlying mechanisms are poorly understood. To study filopodial motility, we collected and analyzed image data on filopodia in cultured rat hippocampal neurons. We hypothesized that mechanical feedback among the actin retrograde flow, myosin activity, and substrate adhesion gives rise to various filopodial behaviors. We formulated a minimal one-dimensional partial differential equation model that reproduced the range of observed motility. To validate our model, we systematically manipulated experimental correlates of parameters in the model: substrate adhesion strength, actin polymerization rate, myosin contractility, and the integrity of the putative microtubule-based barrier at the filopodium base. The model predicts the response of the system to each of these experimental perturbations, supporting the hypothesis that our actomyosin-driven mechanism controls dendritic filopodia dynamics.
树突状丝状伪足是充满肌动蛋白的动态亚细胞结构,在神经发生过程中出现在神经元树突上。丝状伪足的探索性运动对于突触形成至关重要,但其潜在机制仍知之甚少。为了研究丝状伪足的运动,我们收集并分析了培养的大鼠海马神经元中丝状伪足的图像数据。我们假设肌动蛋白逆行流动、肌球蛋白活性和底物黏附之间的机械反馈会产生各种丝状伪足行为。我们建立了一个最小的一维偏微分方程模型,该模型再现了观察到的运动范围。为了验证我们的模型,我们系统地操纵了模型中参数的实验相关因素:底物黏附强度、肌动蛋白聚合速率、肌球蛋白收缩性以及丝状伪足基部假定的基于微管的屏障的完整性。该模型预测了系统对这些实验扰动中每一个的响应,支持了我们的肌动球蛋白驱动机制控制树突状丝状伪足动力学的假设。