Hamlyn Centre for Robotic Surgery, Imperial College London, London, UK.
Int J Comput Assist Radiol Surg. 2017 Jun;12(6):921-930. doi: 10.1007/s11548-017-1558-9. Epub 2017 Mar 24.
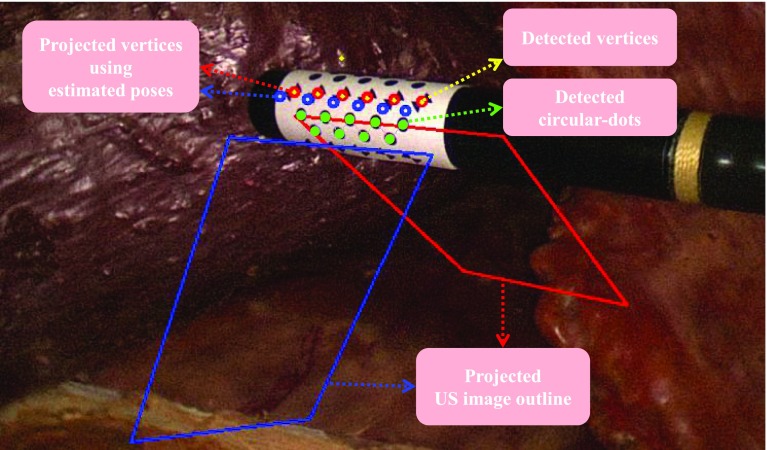
To provide an integrated visualisation of intraoperative ultrasound and endoscopic images to facilitate intraoperative guidance, real-time tracking of the ultrasound probe is required. State-of-the-art methods are suitable for planar targets while most of the laparoscopic ultrasound probes are cylindrical objects. A tracking framework for cylindrical objects with a large work space will improve the usability of the intraoperative ultrasound guidance.
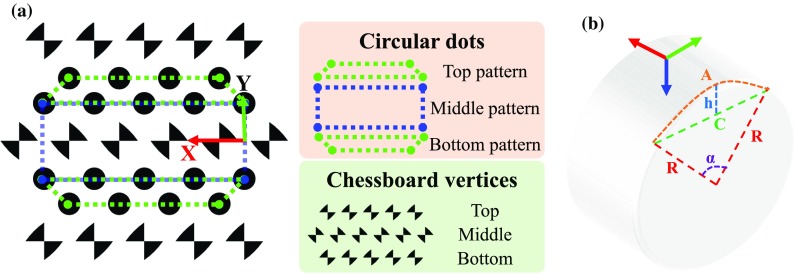
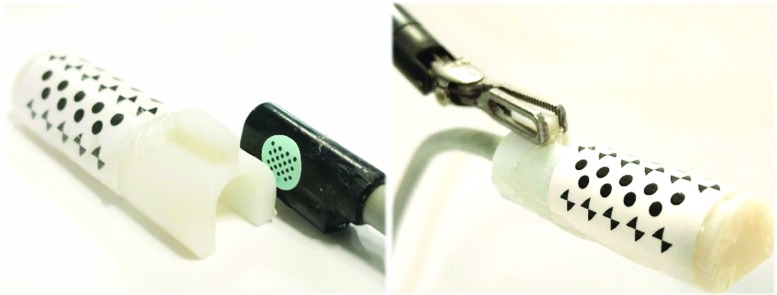
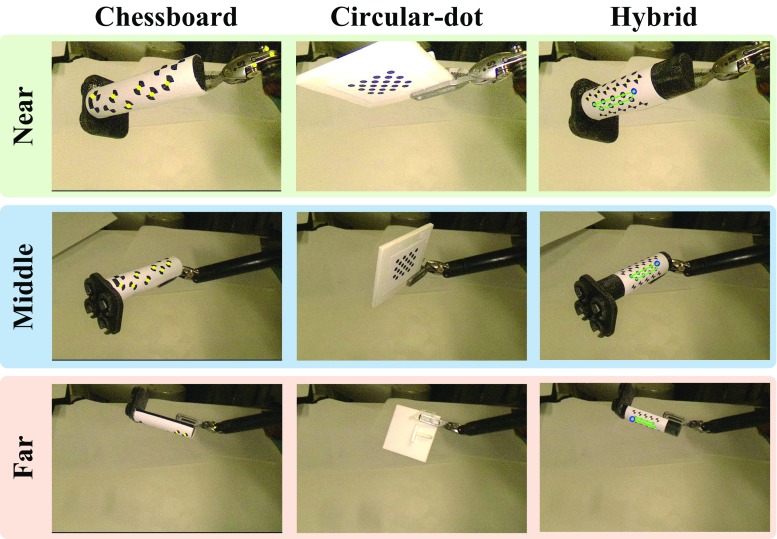
A hybrid marker design that combines circular dots and chessboard vertices is proposed for facilitating tracking cylindrical tools. The circular dots placed over the curved surface are used for pose estimation. The chessboard vertices are employed to provide additional information for resolving the ambiguous pose problem due to the use of planar model points under a monocular camera. Furthermore, temporal information between consecutive images is considered to minimise tracking failures with real-time computational performance.
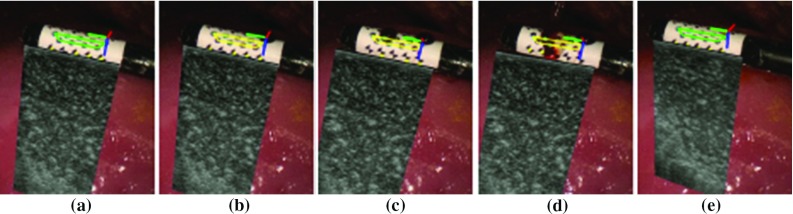
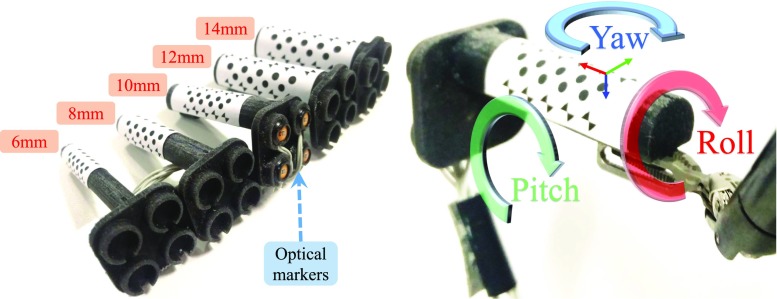
Detailed validation confirms that our hybrid marker provides a large working space for different tool sizes (6-14 mm in diameter). The tracking framework allows translational movements between 40 and 185 mm along the depth direction and rotational motion around three local orthogonal axes up to [Formula: see text]. Comparative studies with the current state of the art confirm that our approach outperforms existing methods by providing nearly 100% detection rates and accurate pose estimation with mean errors of 2.8 mm and 0.72[Formula: see text]. The tracking algorithm runs at 20 frames per second for [Formula: see text] image resolution videos.
Experiments show that the proposed hybrid marker can be applied to a wide range of surgical tools with superior detection rates and pose estimation accuracies. Both the qualitative and quantitative results demonstrate that our framework can be used not only for assisting intraoperative ultrasound guidance but also for tracking general surgical tools in MIS.
提供术中超声和内窥镜图像的集成可视化,以方便术中引导,需要实时跟踪超声探头。最先进的方法适用于平面目标,而大多数腹腔镜超声探头是圆柱形物体。具有大工作空间的圆柱形物体跟踪框架将提高术中超声引导的可用性。
提出了一种混合标记设计,该设计结合了圆形点和棋盘顶点,以方便跟踪圆柱形工具。放置在曲面上的圆形点用于姿势估计。棋盘顶点用于提供附加信息,以解决由于在单目相机下使用平面模型点而导致的姿势问题。此外,连续图像之间的时间信息用于最小化具有实时计算性能的跟踪失败。
详细验证证实,我们的混合标记为不同工具尺寸(直径 6-14 毫米)提供了大的工作空间。跟踪框架允许在深度方向上平移 40 到 185 毫米,并围绕三个局部正交轴旋转运动,最大可达 [公式:见文本]。与现有技术的比较研究证实,我们的方法通过提供近 100%的检测率和平均误差为 2.8 毫米和 0.72[公式:见文本]的准确姿势估计,优于现有方法。跟踪算法以 20 帧/秒的速度运行,用于 [公式:见文本] 图像分辨率视频。
实验表明,所提出的混合标记可应用于广泛的手术工具,具有较高的检测率和姿势估计精度。定性和定量结果都表明,我们的框架不仅可用于辅助术中超声引导,还可用于跟踪微创手术中的一般手术工具。