Crawford Anna, Armstrong Kiley, Loparo Kenneth, Audu Musa, Triolo Ronald
a Motion Study Laboratory, Louis Stokes Cleveland, Affairs Medical Center , Cleveland , OH , USA.
b Department of Biomedical Engineering , Case Western Reserve University , Cleveland , OH , USA.
Disabil Rehabil Assist Technol. 2018 Feb;13(2):178-185. doi: 10.1080/17483107.2017.1300347. Epub 2017 Apr 1.
The purpose of this study was to detect and classify potentially destabilizing conditions encountered by manual wheelchair users with spinal cord injuries (SCI) to dynamically increase stability and prevent falls.
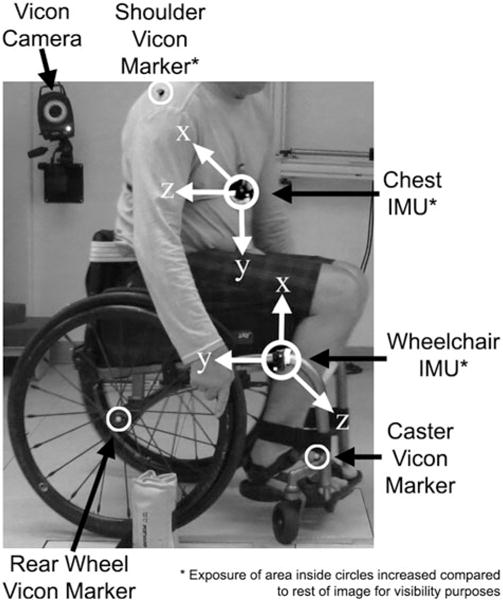
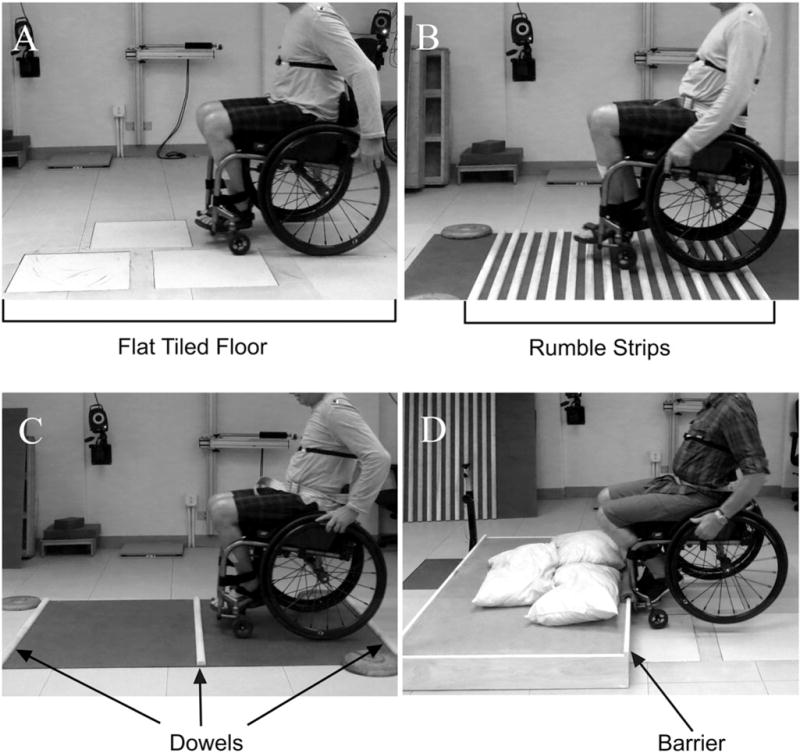
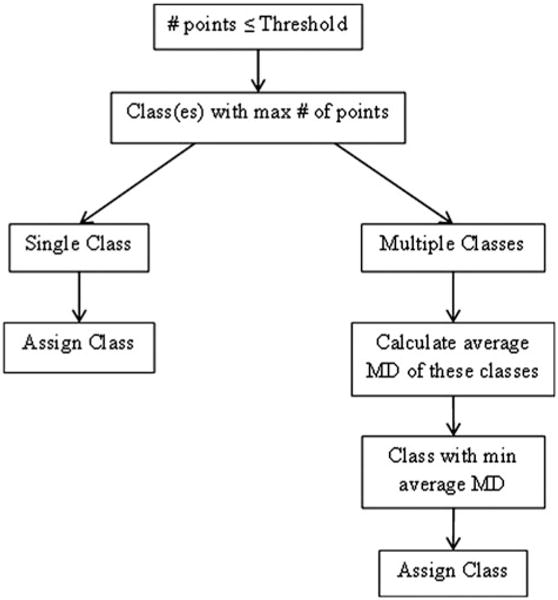
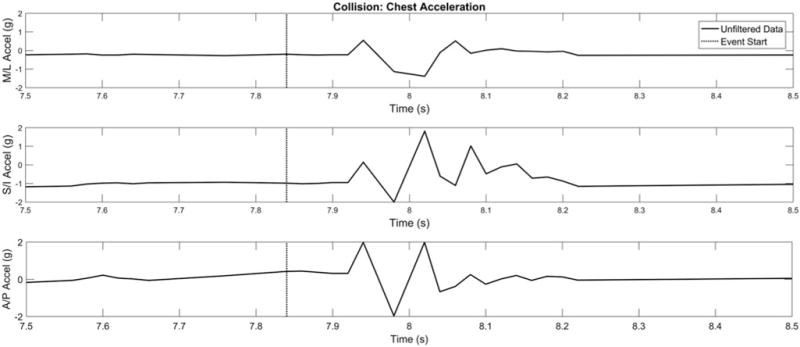
A volunteer with motor complete T11 paraplegia repeatedly propelled his manual wheelchair over level ground and simulated destabilizing conditions including sudden stops, bumps and rough terrain. Wireless inertial measurement units attached to the wheelchair frame and his sternum recorded associated accelerations and angular velocities. Algorithms based on mean, standard deviation and minimum Mahalanobis distance between conditions were constructed and applied to the data off-line to discriminate between events. Classification accuracy was computed to assess effects of sensor position and potential for automatically selecting a dynamic intervention to best stabilize the wheelchair user.
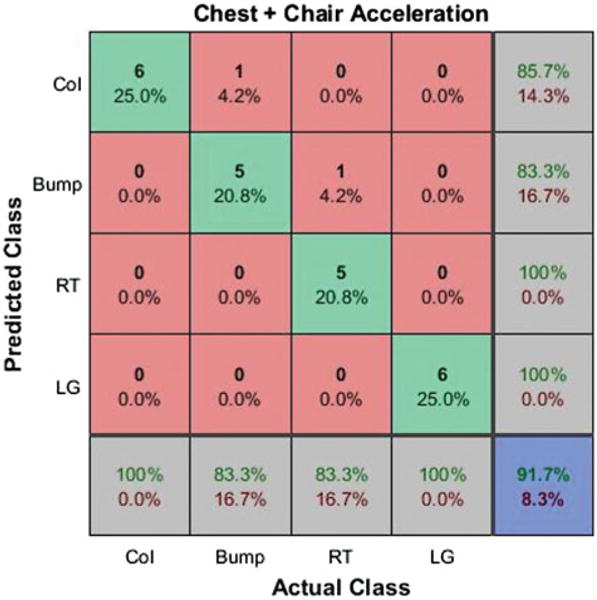
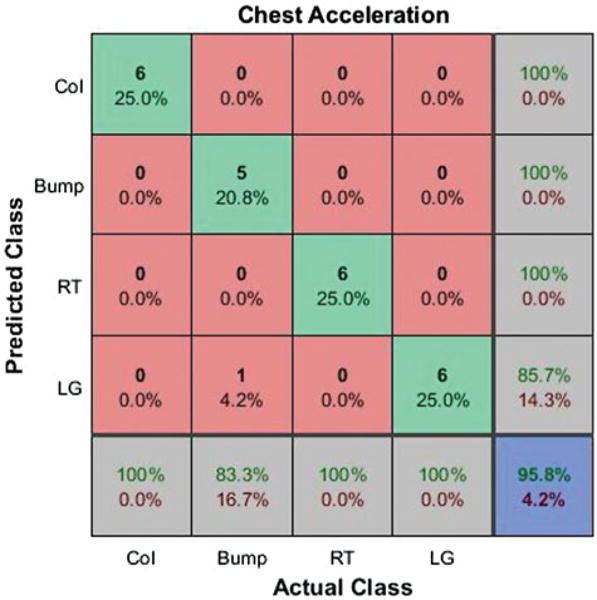
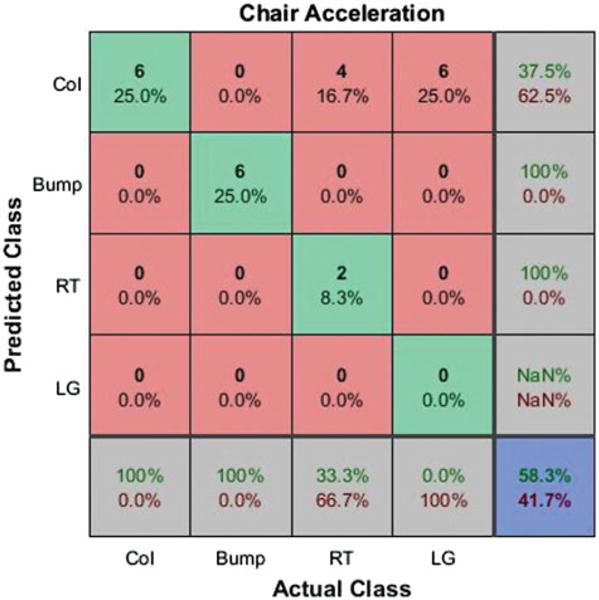
The decision algorithm based on acceleration signals successfully differentiated destabilizing conditions and level over-ground propulsion with classification accuracies of 95.8, 58.3 and 91.7% for the chest, wheelchair and both sensors, respectively.
Mahalanobis distance classification based on trunk accelerations is a feasible method for detecting destabilizing events encountered by wheelchair users and may serve as an effective trigger for protective interventions. Incorporating data from wheelchair-mounted sensors decreases the false negative rate. Implications for Rehabilitation SCI has a significant impact on quality of life, compromising the ability to participate in social or leisure activities, and complete other activities of daily living for an independent lifestyle. Using inertial measurement units to build an event classifier for control the actions of a neuroprosthetic device for maintaining seated posture in wheelchair users. Varying muscle activation increases user stability reducing the risk of injury.
本研究的目的是检测并分类脊髓损伤(SCI)的手动轮椅使用者遇到的潜在不稳定状况,以动态增加稳定性并预防跌倒。
一名运动完全性T11截瘫的志愿者在平坦地面上反复推动他的手动轮椅,并模拟不稳定状况,包括突然停止、颠簸和崎岖地形。附着在轮椅框架和他胸骨上的无线惯性测量单元记录相关的加速度和角速度。构建基于条件之间均值、标准差和最小马氏距离的算法,并离线应用于数据以区分不同事件。计算分类准确率以评估传感器位置的影响以及自动选择动态干预以最佳稳定轮椅使用者的可能性。
基于加速度信号的决策算法成功区分了不稳定状况和平坦地面推进,胸部、轮椅和两个传感器的分类准确率分别为95.8%、58.3%和91.7%。
基于躯干加速度的马氏距离分类是检测轮椅使用者遇到的不稳定事件的可行方法,并且可以作为保护性干预的有效触发因素。纳入来自安装在轮椅上的传感器的数据可降低假阴性率。对康复的意义SCI对生活质量有重大影响,损害了参与社交或休闲活动以及完成其他日常生活活动以实现独立生活方式的能力。使用惯性测量单元构建事件分类器以控制神经假体装置的动作,从而在轮椅使用者中维持坐姿。不同的肌肉激活可增加使用者的稳定性,降低受伤风险。