Caballero-Águila Raquel, Hermoso-Carazo Aurora, Linares-Pérez Josefa
Dpto. de Estadística, Universidad de Jaén, Paraje Las Lagunillas, 23071 Jaén, Spain.
Dpto. de Estadística, Universidad de Granada, Avda. Fuentenueva, 18071 Granada, Spain.
Sensors (Basel). 2017 May 18;17(5):1151. doi: 10.3390/s17051151.
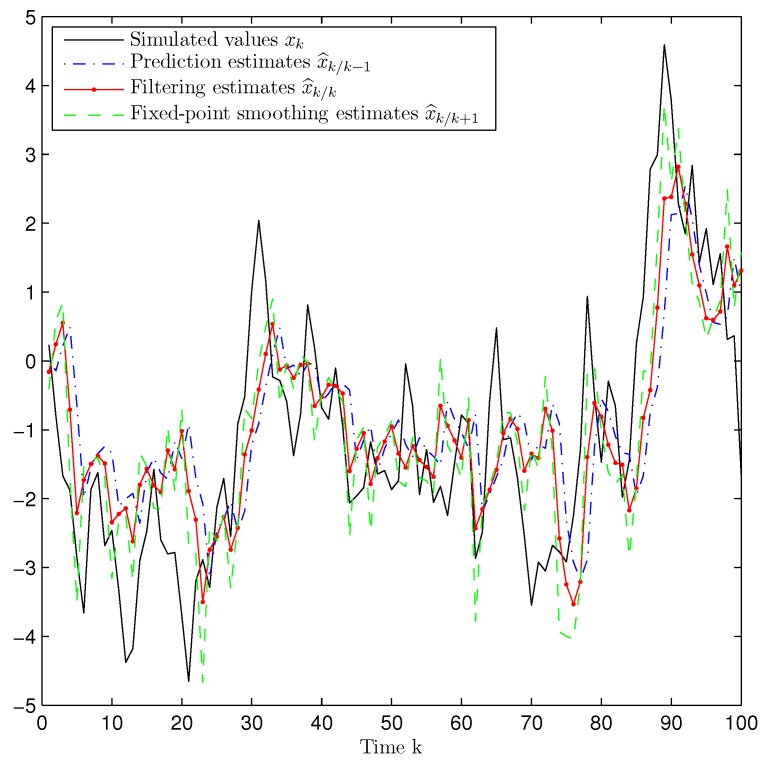
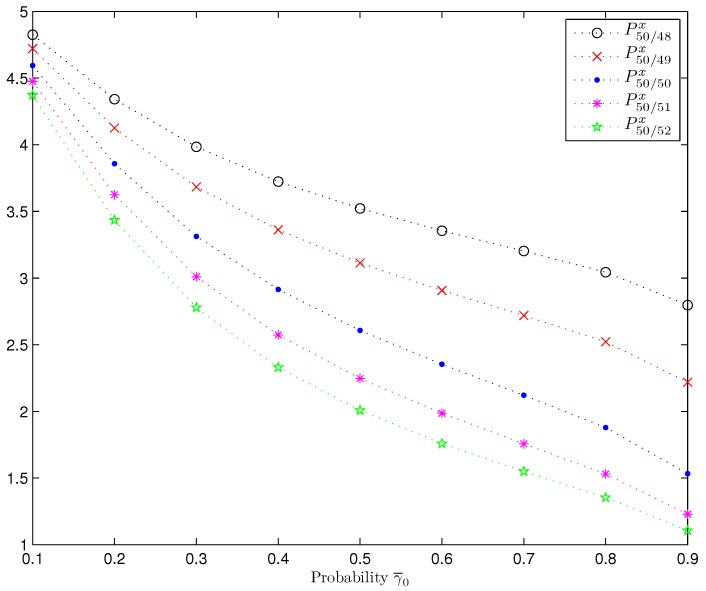
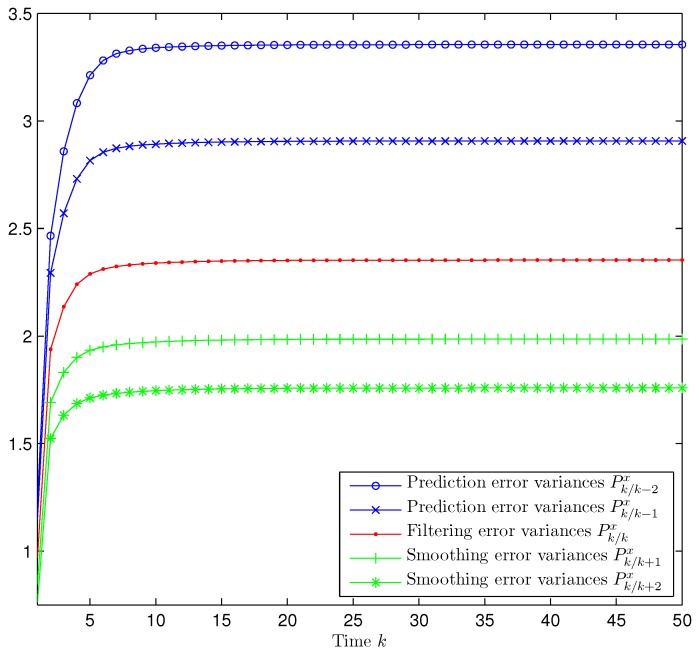
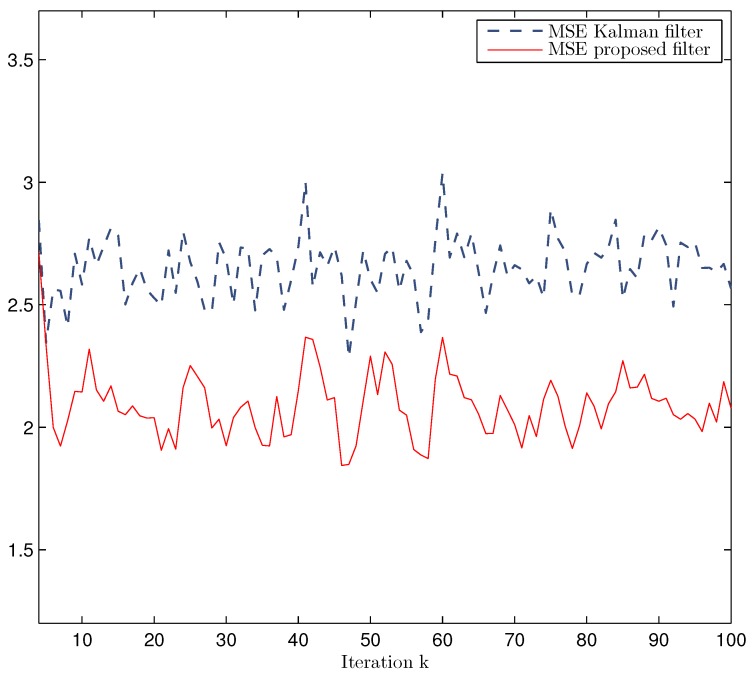
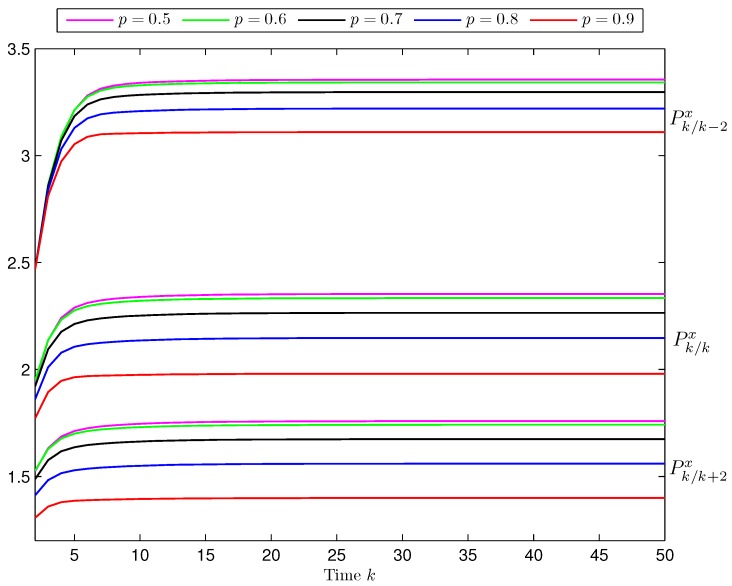
This paper is concerned with the optimal fusion estimation problem in networked stochastic systems with bounded random delays and packet dropouts, which unavoidably occur during the data transmission in the network. The measured outputs from each sensor are perturbed by random parameter matrices and white additive noises, which are cross-correlated between the different sensors. Least-squares fusion linear estimators including filter, predictor and fixed-point smoother, as well as the corresponding estimation error covariance matrices are designed via the innovation analysis approach. The proposed recursive algorithms depend on the delay probabilities at each sampling time, but do not to need to know if a particular measurement is delayed or not. Moreover, the knowledge of the signal evolution model is not required, as the algorithms need only the first and second order moments of the processes involved. Some of the practical situations covered by the proposed system model with random parameter matrices are analyzed and the influence of the delays in the estimation accuracy are examined in a numerical example.
本文关注具有有界随机时延和数据包丢失的网络随机系统中的最优融合估计问题,这些情况在网络数据传输过程中不可避免地会出现。每个传感器的测量输出受到随机参数矩阵和白色加性噪声的干扰,不同传感器之间的这些干扰是相互关联的。通过创新分析方法设计了包括滤波器、预测器和定点平滑器在内的最小二乘融合线性估计器,以及相应的估计误差协方差矩阵。所提出的递归算法依赖于每个采样时刻的时延概率,但不需要知道特定测量是否被延迟。此外,不需要信号演化模型的知识,因为算法只需要所涉及过程的一阶和二阶矩。分析了所提出的具有随机参数矩阵的系统模型所涵盖的一些实际情况,并通过数值例子研究了时延对估计精度的影响。