Mostaghaci Babak, Yasa Oncay, Zhuang Jiang, Sitti Metin
Physical Intelligence Department Max-Planck Institute for Intelligent Systems 70569 Stuttgart Germany.
Department of Mechanical Engineering Carnegie Mellon University Pittsburgh PA 15213 USA.
Adv Sci (Weinh). 2017 May 18;4(6):1700058. doi: 10.1002/advs.201700058. eCollection 2017 Jun.
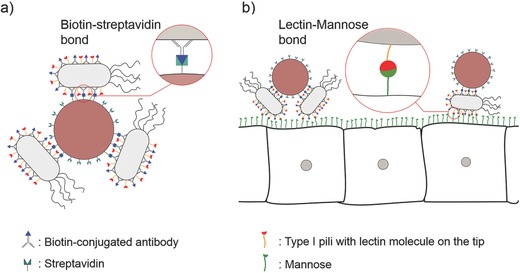
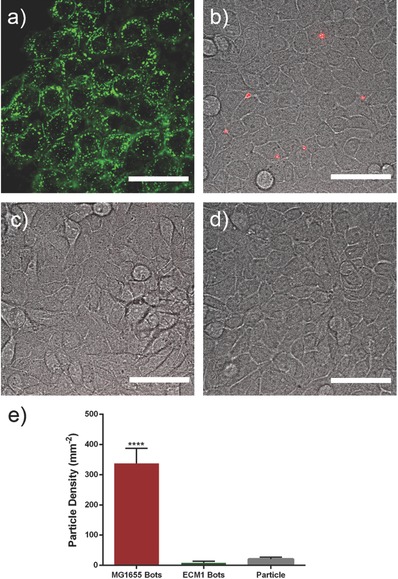
Bacteria-driven biohybrid microswimmers (bacteriabots), which integrate motile bacterial cells and functional synthetic cargo parts (e.g., microparticles encapsulating drug), are recently studied for targeted drug delivery. However, adhesion of such bacteriabots to the tissues on the site of a disease (which can increase the drug delivery efficiency) is not studied yet. Here, this paper proposes an approach to attach bacteriabots to certain types of epithelial cells (expressing mannose on the membrane), based on the affinity between lectin molecules on the tip of bacterial type I pili and mannose molecules on the epithelial cells. It is shown that the bacteria can anchor their cargo particles to mannose-functionalized surfaces and mannose-expressing cells (ATCC HTB-9) using the lectin-mannose bond. The attachment mechanism is confirmed by comparing the adhesion of bacteriabots fabricated from bacterial strains with or without type I pili to mannose-covered surfaces and cells. The proposed bioadhesive motile system can be further improved by expressing more specific adhesion moieties on the membrane of the bacteria.
细菌驱动的生物杂交微游动器(细菌机器人)将有运动能力的细菌细胞与功能性合成载药部分(如包裹药物的微粒)结合在一起,最近被用于靶向给药研究。然而,这类细菌机器人在疾病部位与组织的黏附(这可提高药物递送效率)尚未得到研究。在此,本文基于细菌I型菌毛尖端的凝集素分子与上皮细胞上的甘露糖分子之间的亲和力,提出一种将细菌机器人附着到某些类型上皮细胞(膜上表达甘露糖)的方法。结果表明,细菌可利用凝集素 - 甘露糖键将其载药颗粒锚定到甘露糖功能化表面和表达甘露糖的细胞(美国典型培养物保藏中心HTB - 9)上。通过比较由有或没有I型菌毛的细菌菌株制造的细菌机器人与甘露糖覆盖表面和细胞的黏附情况,证实了附着机制。通过在细菌膜上表达更具特异性的黏附部分,可进一步改进所提出的生物黏附运动系统。