Department of Systems and Synthetic Microbiology, Max Planck Institute for Terrestrial Microbiology & LOEWE Center for Synthetic Microbiology (SYNMIKRO), 35043, Marburg, Germany.
Physical Intelligence Department, Max Planck Institute for Intelligent Systems, 70569, Stuttgart, Germany.
Sci Rep. 2018 Jun 28;8(1):9801. doi: 10.1038/s41598-018-28102-9.
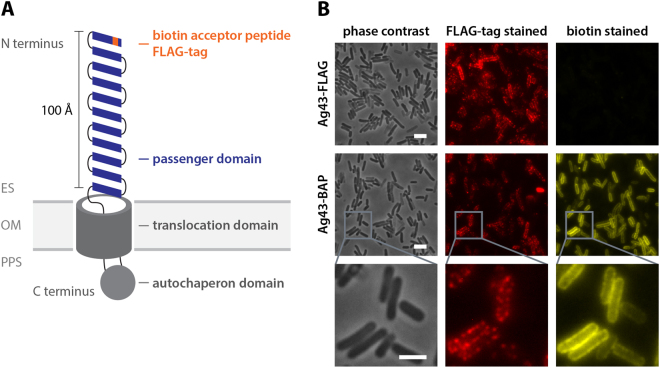
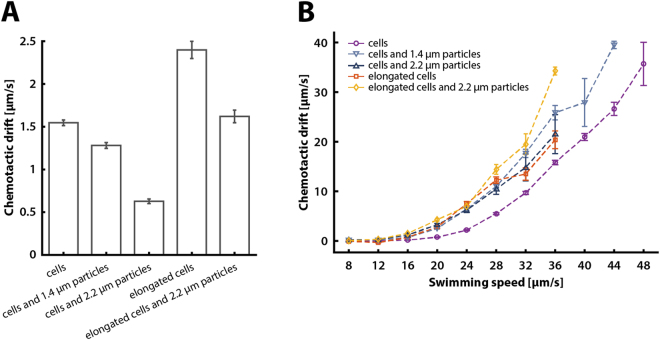
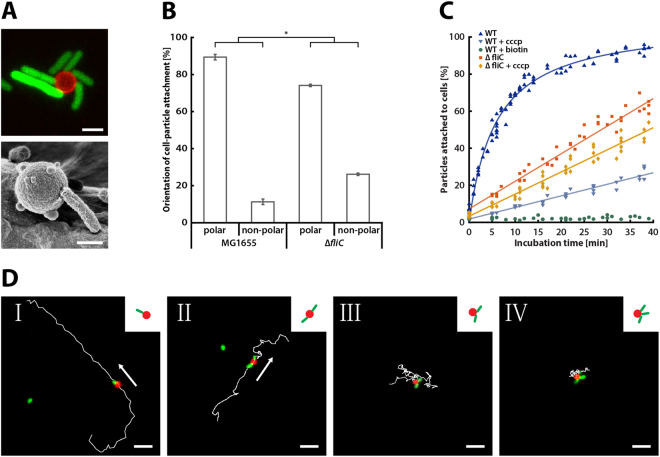
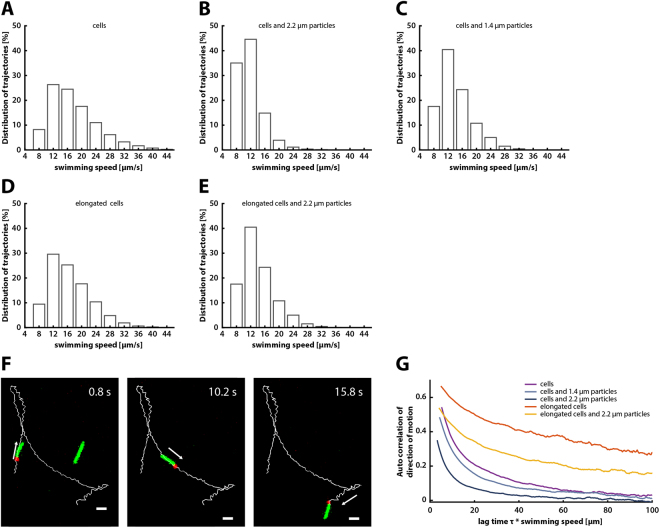
Bacteria-driven biohybrid microswimmers (bacteriabots) combine synthetic cargo with motile living bacteria that enable propulsion and steering. Although fabrication and potential use of such bacteriabots have attracted much attention, existing methods of fabrication require an extensive sample preparation that can drastically decrease the viability and motility of bacteria. Moreover, chemotactic behavior of bacteriabots in a liquid medium with chemical gradients has remained largely unclear. To overcome these shortcomings, we designed Escherichia coli to autonomously display biotin on its cell surface via the engineered autotransporter antigen 43 and thus to bind streptavidin-coated cargo. We show that the cargo attachment to these bacteria is greatly enhanced by motility and occurs predominantly at the cell poles, which is greatly beneficial for the fabrication of motile bacteriabots. We further performed a systemic study to understand and optimize the ability of these bacteriabots to follow chemical gradients. We demonstrate that the chemotaxis of bacteriabots is primarily limited by the cargo-dependent reduction of swimming speed and show that the fabrication of bacteriabots using elongated E. coli cells can be used to overcome this limitation.
细菌驱动的生物杂交微型游泳者(bacteriabots)将合成货物与运动的活细菌结合在一起,从而实现推进和转向。尽管这种 bacteriabots 的制造和潜在用途引起了广泛关注,但现有的制造方法需要广泛的样品制备,这会极大地降低细菌的活力和运动能力。此外,化学梯度液体介质中 bacteriabots 的趋化行为在很大程度上仍不清楚。为了克服这些缺点,我们通过工程化的自转运抗原 43 使大肠杆菌自主地在其细胞表面显示生物素,从而与链霉亲和素涂层货物结合。我们表明,通过运动大大增强了这些细菌对货物的附着,并且主要发生在细胞的两极,这对制造运动细菌机器人非常有利。我们进一步进行了系统研究,以了解和优化这些细菌机器人跟随化学梯度的能力。我们证明,细菌机器人的趋化性主要受游泳速度因货物而降低的限制,并表明使用细长的大肠杆菌细胞制造细菌机器人可以克服这一限制。