Liu Jie, Kang Sang Hoon, Xu Dali, Ren Yupeng, Lee Song Joo, Zhang Li-Qun
Sensory Motor Performance Program, Rehabilitation Institute of ChicagoChicago, IL, United States.
School of Mechanical, Aerospace, and Nuclear Engineering, Ulsan National Institute of Science and TechnologyUlsan, South Korea.
Front Neurosci. 2017 Aug 25;11:480. doi: 10.3389/fnins.2017.00480. eCollection 2017.
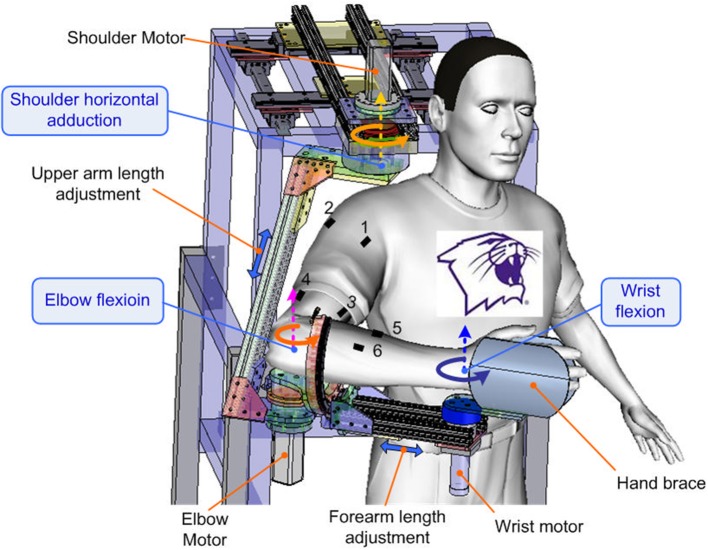
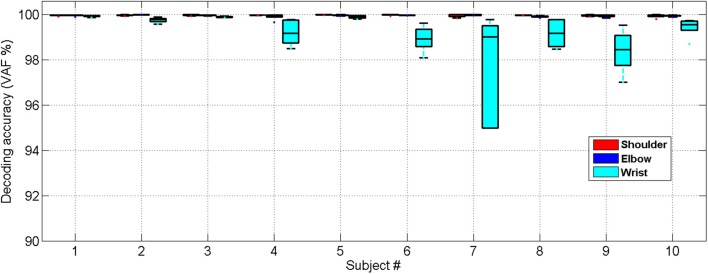
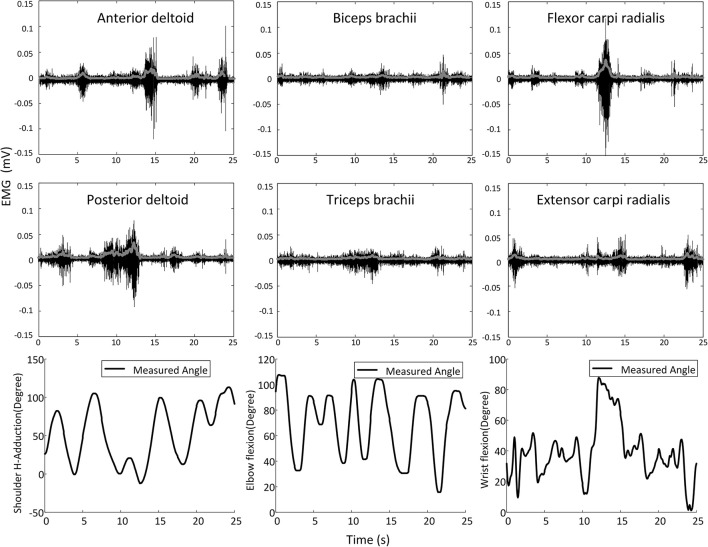
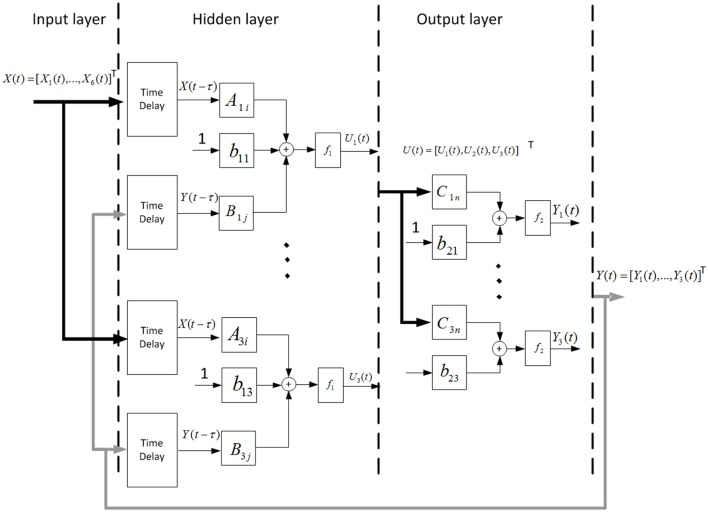
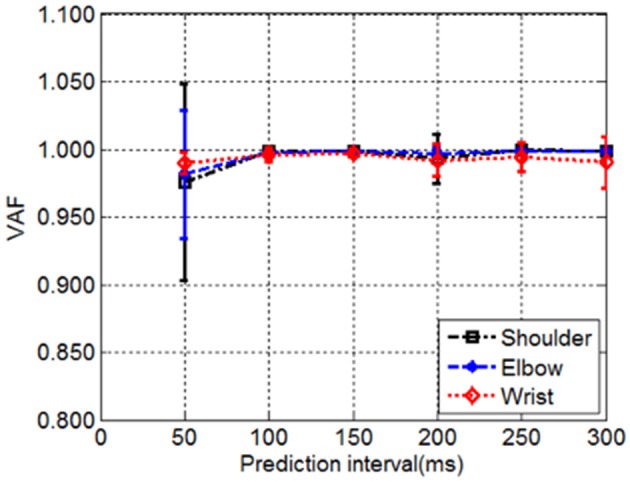
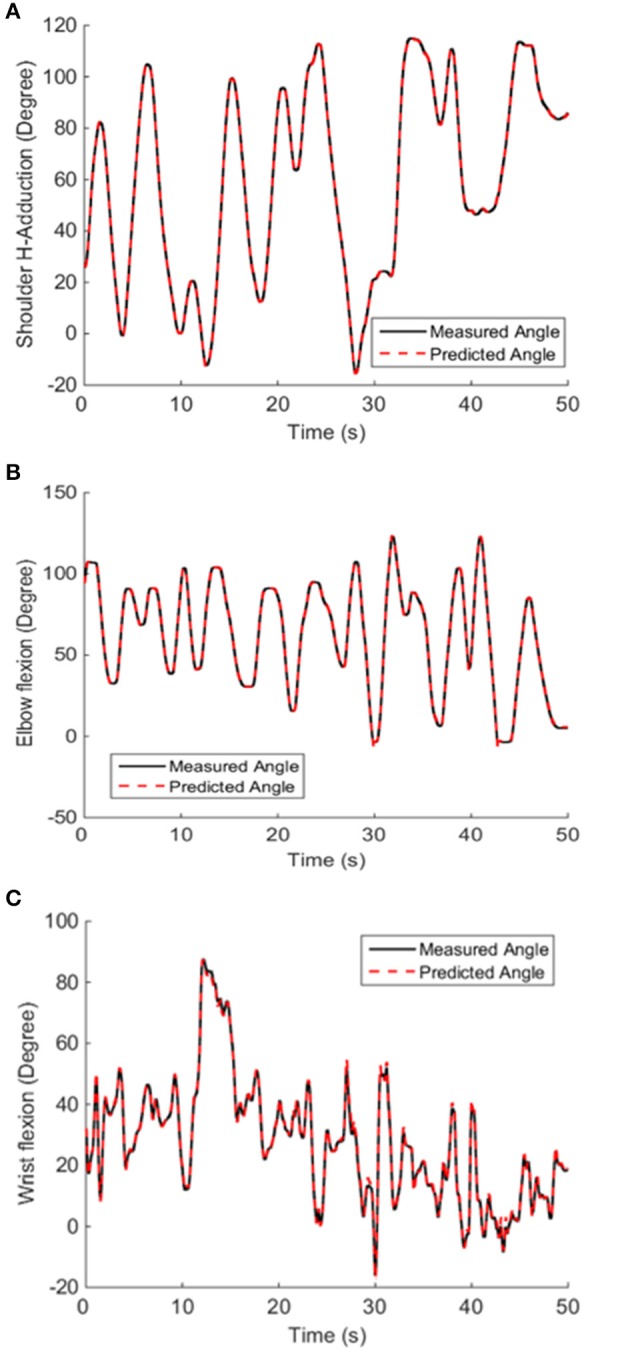
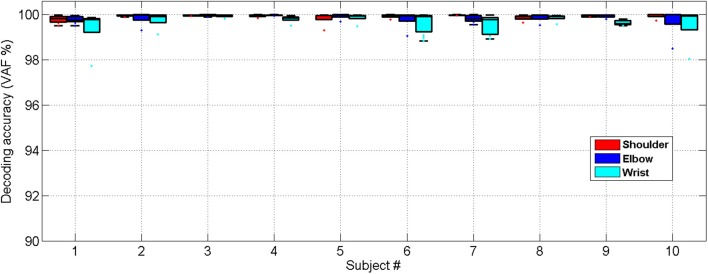
Among the potential biological signals for human-machine interactions (brain, nerve, and muscle signals), electromyography (EMG) widely used in clinical setting can be obtained non-invasively as motor commands to control movements. The aim of this study was to develop a model for continuous and simultaneous decoding of multi-joint dynamic arm movements based on multi-channel surface EMG signals crossing the joints, leading to application of myoelectrically controlled exoskeleton robots for upper-limb rehabilitation. Twenty subjects were recruited for this study including 10 stroke subjects and 10 able-bodied subjects. The subjects performed free arm reaching movements in the horizontal plane with an exoskeleton robot. The shoulder, elbow and wrist movements and surface EMG signals from six muscles crossing the three joints were recorded. A non-linear autoregressive exogenous (NARX) model was developed to continuously decode the shoulder, elbow and wrist movements based solely on the EMG signals. The shoulder, elbow and wrist movements were decoded accurately based only on the EMG inputs in all the subjects, with the variance accounted for (VAF) > 98% for all three joints. The proposed approach is capable of simultaneously and continuously decoding multi-joint movements of the human arm by taking into account the non-linear mappings between the muscle EMGs and joint movements, which may provide less effortful control of robotic exoskeletons for rehabilitation training of individuals with neurological disorders and arm impairment.
在人机交互的潜在生物信号(大脑、神经和肌肉信号)中,临床环境中广泛使用的肌电图(EMG)可以作为控制运动的运动指令以非侵入方式获取。本研究的目的是基于穿过关节的多通道表面肌电信号,开发一种用于连续同时解码多关节动态手臂运动的模型,从而将肌电控制的外骨骼机器人应用于上肢康复。本研究招募了20名受试者,包括10名中风患者和10名健康受试者。受试者通过外骨骼机器人在水平面内进行自由手臂伸展运动。记录了肩部、肘部和腕部的运动以及来自穿过三个关节的六块肌肉的表面肌电信号。开发了一种非线性自回归外生(NARX)模型,仅基于肌电信号连续解码肩部、肘部和腕部的运动。在所有受试者中,仅基于肌电输入就能准确解码肩部、肘部和腕部的运动,所有三个关节的解释方差(VAF)>98%。所提出的方法能够通过考虑肌肉肌电与关节运动之间的非线性映射,同时连续解码人类手臂的多关节运动,这可能为神经功能障碍和手臂损伤个体的康复训练提供对机器人外骨骼更轻松的控制。